Влияние автоматических регуляторов на гидравлический режим систем водяного отопления
В статье исследуется влияние регулирующей арматуры в совокупности с циркуляционным насосом на распределение теплоносителя в системе отопления с помощью компьютерного моделирования. Дана оценка воздействию балансировочных клапанов и терморегуляторов на гидравлику системы отопления в целом и ее отдельных участков с учетом их конструктивных особенностей.
Современный рынок оборудования для систем отопления наполнен широким ассортиментом арматуры. В отечественной практике стали чаще использоваться балансировочные клапаны, терморегуляторы, узлы регулирования, регуляторы перепада давления и расхода различных конструкций. Встает вопрос о том, какую регулирующую арматуру необходимо устанавливать в системах отопления, в каком количестве и на каких участках.
Важным элементом, предназначенным для регулирования системы, а значит, и для достижения максимально комфортных условий для пребывания людей в помещении, является терморегулятор. Он позволяет не только обеспечить необходимое количество теплоты, отдаваемое отопительным прибором, но и воздействовать на всю систему отопления в целом, непроизвольно изменяя гидравлический режим ее работы.
Конечной целью расчета системы отопления и подбора оборудования для нее является обеспечение необходимого значения теплового потока от каждого отопительного прибора для компенсации теплопотерь помещений здания в целом и достижения комфортных условий для пребывания людей в здании на протяжении всего отопительного сезона. Для соблюдения этих условий применяются два метода. Первый заключается в максимально возможном увязывании колец системы диаметрами отдельных трубных участков системы и установки наименьшего количества регулирующей арматуры. Второй метод пришел в отечественную практику вместе с новыми видами арматуры из Западной Европы. Он заключается в установке наибольшего количества арматуры на стояках, в тепловых пунктах и на ответвлениях для увязки циркуляционных колец непосредственно самой арматурой.
Оба метода имеют свои преимущества и недостатки.
Для подбора терморегуляторов, регуляторов расхода и балансировочных клапанов в современной практике используется характеристика, называемая пропускной способностью. Ее определяют как объемный расход воды в м 3 /ч с плотностью 1000 кг/м 3 , проходящей через клапан при перепаде давления 10 5 Па (1 бар). Размерность его (м 3 /ч)/бар 0,5 или, пренебрегая физическим смыслом, в каталогах часто пишут просто – м 3 /ч.
За счет изменения kv на клапанах происходит изменение двух параметров: расхода теплоносителя через клапан G и перепада давления на клапане ∆P. Это влияет не только на гидравлику отдельных участков, но и на систему отопления в целом. Это важный фактор, который должен учитываться проектировщиками.
Клапан отопительного прибора способен автоматически изменять свою пропускную способность в зависимости от температуры воздуха в помещении за счет термостатической головки, датчиков внутреннего воздуха или же за счет ручного регулирования потребителем.
Важно также заметить, что необходим тщательный подбор термоклапанов у отопительных приборов, потому что зависимость их теплоотдачи от расхода теплоносителя нелинейная. Также и у клапанов. Они бывают различного конструктивного исполнения, и зависимость хода штока от пропускной способности имеет свои особенности. Сопоставляя эти две характеристики, мы получим общую характеристику регулируемого участка [1].
Однако изменения характеристик регулируемого участка может привести к разрегулировке всей системы. Под разрегулировкой будем понимать несоответствие расходов теплоносителя в отопительных приборах относительно расчетных или необходимых, вследствие чего произойдет недостаток или избыток теплоподачи в помещения.
В системе отопления факторами разрегулировки являются:
отключение ветвей, стояков, отопительных приборов и других элементов системы в связи с аварией или за ненадобностью;
изменение расчетного расхода теплоносителя в отопительном приборе с целью поддержания необходимой температуры или минимальной температуры помещения из-за временного его неиспользования;
изменения схемы или элементов системы отопления после реконструкции и ремонта.
Циркуляционный насос системы отопления тоже имеет различные изменяющиеся характеристики, которые должны учитываться при регулировке системы. В данном исследовании был применен стандартный (современный бесфундаментный) насос. Ошибочно убеждение современных проектировщиков в том, что для качественной и «беспроигрышной» увязки гидравлических колец необходимо подбирать циркуляционный насос с большим запасом по располагаемому давлению. Это приводит к неоправданно завышенным стоимости системы и расходу электроэнергии.
Современные конструкции насосов позволяют более экономно расходовать электроэнергию и более точно поддерживать заданное располагаемое давление и расход в системе (насосы с электрическим управлением). При увеличенных капитальных затратах на эти насосы можно выиграть в пониженных эксплуатационных затратах на электроэнергию.
Однако, ориентируясь на новые технологии, в ходе конструирования системы отопления необходимо комплексно подходить к возможным гидравлическим и, соответственно, тепловым разрегулировкам при эксплуатации системы.
На примере конкретных схем систем отопления рассмотрим достоинства и недостатки двух методов конструирования системы отопления, о которых говорилось ранее. Анализ схем проводился с помощью компьютерного моделирования.
Система отопления без применения балансировочного клапана
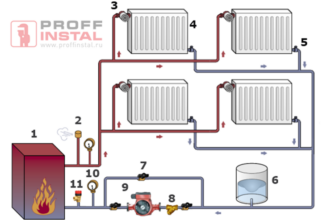
На рис. 1 приведена схема без применения балансировочного клапана.
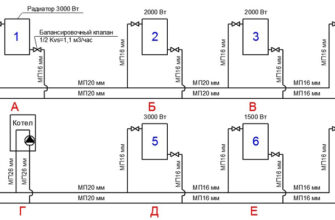
Схемы системы отопления без применения балансировочных клапанов
Для начала был выполнен стандартный гидравлический расчет по методу удельных линейных потерь давления для подбора диаметров. Клапаны были подобраны по каталогам фирмы-производителя, после чего была задана их установочная характеристика (пропускная способность, перепад давления и положение установки). Затем методом гидравлического расчета по характеристикам сопротивления определены коэффициенты затекания в каждый стояк и в каждый прибор.
В первом случае из регулирующей арматуры имеются только клапаны у отопительных приборов. Для анализа системы отключим один прибор на верхнем этаже первого стояка. Характеристика сопротивления увеличится и на графике (рис. 2) примет положение S1, а необходимый расход теплоносителя понизится на величину расчетного расхода в отключенном приборе (до 288,3 кг/ч). В самом начале отопительные приборы начнут получать больше теплоты, что приведет к перегреву помещений. Термостатические головки, электроника или же потребители вручную, реагируя на это, начнут воздействовать на клапан, который будет опускать шток клапана, уменьшая тем самым свою пропускную способность и увеличивая сопротивление всей системы. Каждый клапан будет опускать шток ровно на столько, на сколько расход теплоносителя должен измениться в отопительном прибое. В конце концов, установится стационарный режим, когда температура в помещениях стабилизируется, и штоки клапанов перестанут двигаться.
Характеристика насоса и системы отопления без использования балансировочных клапанов S, ΔP, G – характеристика сопротивления, потери давления и расход теплоносителя в системе отопления соответственно; значения индексов этих параметров: «расч» – в исходном (расчетном) режиме; «1» – при отключении верхнего прибора первого стояка; «2» – при отключении первого стояка
Чтобы описать физику процесса, использовано понятие коэффициента затекания [2]. Для начала он был определен для всех стояков системы, чтобы получить требуемую характеристику сопротивления на каждом участке стояков, тем самым, определив, какую пропускную способность будет иметь клапан у отопительных приборов в данном конкретном состоянии системы.
Важно заметить, что клапан имеет определенные рамки изменения величины пропускной способности. Для данного случая он был ограничен пределами 0,04…0,54 (м 3 /ч)/бар 0,5 . Верхний предел является величиной при полном (максимальном) открытии клапана. Так же нормируется перепад давления на клапане. На клапане он не должен превышать 0,5 бар или примерно 5000 Па. В случае превышения максимального перепада давлений возможно некорректное регулирование температуры.
В процессе расчета системы и определения величин затекания участков было выявлено, что при расчетном режиме работы системы пропускная способность колеблется в пределах от 0,23 до 0,44 (м 3 /ч)/бар 0,5 , а перепад давления – от 1020 до 2497 Па. Данные значения полностью удовлетворяют требованиям, принятым ранее.
Если отключается первый прибор первого стояка, то после автоматического регулирования и установившегося стационарного теплового режима в помещениях пропускные способности клапанов уменьшаются и находятся в пределах значений 0,19…0,53 (м 3 /ч)/бар 0,5 . Перепады давления, соответственно,– 700…3551 Па. Это тоже вполне удовлетворяет требованиям.
Аналогичная ситуация и при отключении первого стояка. Пропускные способности клапанов уменьшаются и находятся в пределах значений 0,16…0,25 (м 3 /ч)/бар 0,5 . Перепады давления – 3186…3714 Па. Характеристика сети принимает положение S2 на графике (рис. 2)
Видно, что при различном разрегулировочном воздействии на систему отопления происходит изменение характеристики сопротивления системы. Однако клапаны вполне могут «отрегулировать» системы так, чтобы в каждый прибор поступало необходимое количество теплоносителя.
Стоит заметить, что такое регулирование имеет определенные рамки, связанные с перепадом давлений на клапане и фиксированным диапазоном его пропускной способности. К примеру, если бы каждый стояк состоял не из трех, а из 10 приборов и был отключен бы первый стояк, то, возможно, пропускная способность клапанов второго стояка должна была упасть до минимальных значений. При этом резко повысился бы перепад давления на них. Но этот факт необходимо доказать расчетом для конкретной системы. Если таких стояков было бы не три, а 20, то отключение одного стояка слабо бы воздействовало на гидравлику всей системы отопления. Этот фактор также обусловлен характеристикой насоса.
Литература
Пырков В.В. Гидравлическое регулирование систем отопления и охлаждения. Теория и практика. Киев, 2005.
Сканави А.Н., Махов Л.М. Отопление: Учебник для вузов.М., 2008.
Окончание статьи читайте в следующем номере
О регуляторах и качестве регулирования
Опубликовано: журнал АкваТерм №1/2011, автор:Покотилов В.В.
установившейся ошибкой ε или точностью регулирования (разность между установившимся и заданным значениями регулируемого параметра).
Рис. 1. График переходного процесса регулирования при скачкообразном увеличении возмущающего воздействия с показателями качества регулирования: tр – время ре- гулирования, ΔXмакс – динамическая ошибка, ε – устано- вившаяся ошибка или точность регулирования, δ – порог нечувствительности регулятора, 2δ – зона нечувствитель- ности регулятора.
Рис. 2. Характеристики переходного процесса регулирова- ния для регуляторов различного типа.
Пропорциональными или статическими называются такие регуляторы, у которых изменение положения РО пропорционально отклонению регулируемого параметра от его заданного значения. Преимущества П-регулятора – его быстро действие (небольшое время регулирования tp) и высокая устойчивость процесса регулирования. Недостаток – наличие остаточного отклонения ε регулируемого параметра, что снижает точность регулирования. Остаточное отклонение может быть выше или ниже задаваемого параметра в зависимости от повышения или снижения возмущающего воздействия в объекте регулирования. Ввиду этого П-регулирование не реализуется в электронных регуляторах. Для них, как правило, используется ПИД- регулирование, при котором отсутствует зона неравномерности. В основном закон П-регулирования реализуют регуляторы прямого действия. Поэтому регулируемый ими параметр всегда будет отличаться от заданного, за исключением случая, когда нагрузка объекта регулирования является номинальной. Чтобы достигнуть необходимой точности регулирования, следует уменьшить зону неравномерности. Этого можно добиться только за счет высокого качества изготовления регулятора и регулирующего органа при эффективном использовании энергии рабочей среды.
Регуляторы температуры воздуха.
Повышение точности регулирования возможно за счет уменьшения зоны неравномерности. Но и в этом случае регулятор прямого действия будет возвращать объект регулирования не к заданному параметру Хзад., а к его максимальному Хмакс. или минимальному Хмин. значению на границах зоны неравномерности. Поэтому на задатчике зачастую наносится шкала не абсолютных значений регулируемого параметра, а ориентировочно соответствующих им делений, например, как на термостатической головке: 1 – 2 – 3 – 4 – 5 – 6. Прогнозировать (или задавать) качество работы П-регулятора можно в том случае, если производитель сопровождает регулирующий клапан расчетными зависимостями при различных величинах 2ε зоны неравномерности. Например, для клапана TS-90 фирмы Herz Armaturen приводятся три зависимости: 3, 2, 1. К, соответствующие величине зоны неравномерности 2ε = 3, 2 и 1 ‚С и точности регулирования ε = ±1,5, 1,0 и 0,5 °С. В общеевропейской практике принято при подборе термостатического клапана задаваться зоной неравномерности 2 К, обеспечивая при номинальной нагрузке точность регулирования ±1,0 °С. Методика подбора термостатического клапана показана на рис. 3. : стрелками синего цвета – для расчетных расходов 32 и 47 кг/ч, при которых расчетное сопротивление клапана составит соответственно 310 и 620 Па. Характерный расход через отопительный прибор – 50–120 кг/ч.
Для достижения более высокой точности регулирования, например ±0,5 °С, следует воспользоваться зависимостью 1К, но при этом расчетное сопротивление клапана при номинальной нагрузке значительно увеличится и составит соответственно 1000 и 1950 Па. Регуляторы расхода, давления, перепада давлений, являющиеся регуляторами прямого действия, работают за счет непосредственного отбора давления от теплопроводов и объединяют в себе все три элемента автоматического регулятора: датчик, регулятор и исполнительноеустройство. Наиболее распространены стабилизирующие регуляторы, предназначенные для поддержания значения регулируемого параметра на заданном уровне.
Регуляторы расхода теплоносителя.
Их применяют для стабилизации требуемых и задаваемых расходов теплоносителя на ответвлениях, например, на однотрубных стояках системы теплопотребления. На рис. 4. показана общая схема узла стояка однотрубной системы отопления с регулятором расхода.
Рис. 4. Общая схема узла системы ото- пления с регулятором расхода.
Устойчивая работа регулятора будет обеспечена и при более высоком значении располагаемого расчетного перепада давления ΔРРАСП.. Однако при этом значительно увеличивается зона неравномерности 2ε, и соответственно снижается точность регулирования.
Регуляторы перепада давления.
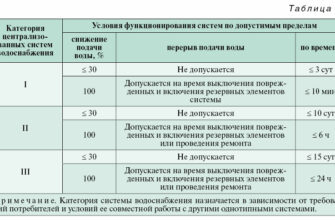
Применяются для стабилизации перепада давления на вводе потребителя теплоты (системы отопления, теплоснабжения, стояков двухтрубной системы отопления), что обеспечивает независимость потребителя от динамических колебаний в разводящих теплопроводах. На рис. 5. показана общая схема узла стояка двухтрубной системы отопления с регулятором перепада давления.
Рис. 5. Общая схема узла двухтрубной системы с регулятором перепада давления.
Устойчивая работа регулятора будет обеспечена и при более высоком значении располагаемого расчетного перепада давления ΔРРАСП. Однако при этом увеличивается зона неравномерности 2ε, и, соответственно, снижается точность регулирования.
ПИД- и ПИ-регуляторы относятся к регуляторам непрерывного действия и применительно к системам теплопотребления имеют между собой схожие характеристики качества регулирования, хотя при прочих равных условиях процесс регулирования с ПИ-регулятором более длителен, чем с ПИД-регулятором. В отличие от П-регулирования, недостатком которого является наличие остаточного отклонения, при ПИД (ПИ)-регулировании регулируемый параметр возвращается точно к задаваемому значению. При регулировании временно проявляется влияние его неравномерности, что, в свою очередь, необходимо для обеспечения его устойчивости. Однако конечная неравномерность регулирования отсутствует. Зона нечувствительности для многих ПИД-регуляторов является задаваемым параметром, принимаемым в зависимости от множества условий: требуемой точности регулирования, инерционности объекта регулирования, значения номинальной нагрузки, прогнозируемого максимального значения возмущающего воздействия и других факторов. В основном применяются электронные и цифровые ПИД-регуляторы.Наиболее распространены стабилизирующие регуляторы, предназначенные для поддержания значения регулируемого параметра на заданном уровне. Автоматические регуляторы следящего регулирования выпускаются в виде отдельно заказываемых изделий. ПИД-регулятор по своим возможностям наиболее универсален. С его помощью можно осуществлять различные законы регулирования.
Позиционное регулирование характеризуется скачкообразной функциональной зависимостью между отклонением регулируемого параметра от заданного значения и перемещением регулирующего органа, который имеет несколько фиксированных положений (позиций). Каждая позиция соответствует определенной области значений регулируемого параметра. По числу позиций различают двух-, трех-, и многопозиционные регуляторы. Наибольшее распространение получили двух- и трехпозиционные. В двухпозиционных САР регулирующее воздействие на объект регулирования принимает только два значения, которые характеризуются двумя крайними положениями РО, например, «Открыто» и «Закрыто», «Включение» и «Отключение». Срабатывание регулятора на включение происходит при минимальном значении регулируемого параметра Xмин. , а отключение нагрузки – при максимальном значении Xмакс., несмотря на то, что при этом на регуляторе задан регулируемый параметр Xзад. Это объясняется наличием гистерезисной петли. Зону гистерезисной петли 2ε двухпозиционных регуляторов называют также дифференциалом (или зоной неравномерности). Точность регулированияопределяется в пределахдифференциала 2ε. Для многих двухпозиционных регуляторов это задаваемый параметр. Для повышения точности регулирования следует уменьшить дифференциал 2ε. Однако это приводит к увеличению частоты срабатывания регулятора, что и является существенным недостатком двухпозиционного регулирования. Поэтому его применяют, как правило, для объектов регулирования, обладающих большой инерционностью (теплоемкостью), – например, баков-аккумуляторов, емкостных теплообменников, напольного отопления. Регулятор воздействует на исполнительный механизм, тип и характеристики которого должны соответствовать типу регулятора и виду сигнала на его выходе. Наиболее распространены стабилизирующие регуляторы, предназначенные для поддержания значения регулируемого параметра на заданном уровне. Датчик и регулирующий прибор могут быть в одном изделии.