- Что такое ПИД регулятор для чайников?
- Что такое ПИД регулятор?
- Три коэффициента ПИД регулятора и принцип работы
- ZONT — УМНЫЕ ПРИБОРЫ ДЛЯ БЕЗОПАСНОСТИ И КОМФОРТА
- Часто задаваемые вопросы
- Режим ПИД регулирования
- ПИД регулятор, простым языком о сложном.
- 1. У нас нет регулирования.
- Тогда просто термостат будет управлять в режиме «греть — не греть» (так называемое двухпозиционное регулирование). Но и его, при желании, можно настроить очень точно.
- 3. Пропор2. Система простого регулирования (двухпозиционное регулирование).
- 4. Интегральное регулирование.
- 5. Дифференциальное регулирование.
- Термоконтроллер с PID-регулированием в мирно-хозяйственных целях
Что такое ПИД регулятор для чайников?
Дифференциальный пропорционально-интегральный регулятор — устройство, которое устанавливают в автоматизированных системах для поддержания заданного параметра, способного к изменениям.
На первый взгляд все запутанно, но можно объяснить ПИД регулирование и для чайников, т.е. людей, не совсем знакомых с электронными системами и приборами.
Что такое ПИД регулятор?
ПИД регулятор — прибор, встроенный в управляющий контур, с обязательной обратной связью. Он предназначен для поддержания установленных уровней задаваемых величин, например, температуры воздуха.
Устройство подает управляющий или выходной сигнал на устройство регулирования, на основании полученных данных от датчиков или сенсоров. Контроллеры обладают высокими показателями точности переходных процессов и качеством выполнения поставленной задачи.

Три коэффициента ПИД регулятора и принцип работы
Работа ПИД-регулятора заключается в подаче выходного сигнала о силе мощности, необходимой для поддержания регулируемого параметра на заданном уровне. Для вычисления показателя используют сложную математическую формулу, в составе которой есть 3 коэффициента — пропорциональный, интегральный, дифференциальный.
Возьмем в качестве объекта регулирования ёмкость с водой, в которой необходимо поддерживать температуру на заданном уровне с помощью регулирования степени открытия клапана с паром.
Пропорциональная составляющая появляется в момент рассогласования с вводными данными. Простыми словами это звучит так — берется разница между фактической температурой и желаемой, умножается на настраиваемый коэффициент и получается выходной сигнал, который должен подаваться на клапан. Т.е. как только градусы упали, запускается процесс нагрева, поднялись выше желаемой отметки — происходит выключение или даже охлаждение.
Дальше вступает интегральная составляющая, которая предназначена для того, чтобы компенсировать воздействие окружающей среды или других возмущающих воздействий на поддержание нашей температуры на заданном уровне. Поскольку всегда присутствуют дополнительные факторы, влияющие на управляемые приборы, в момент поступления данных для вычисления пропорциональной составляющей, цифра уже меняется. И чем больше внешнее воздействие, тем сильнее происходят колебания показателя. Происходят скачки подаваемой мощности.
Интегральная составляющая пытается на основе прошлых значений температуры, вернуть её значение, если оно поменялось. Подробнее процесс описан в видео ниже.
А дальше выходной сигнал регулятора, согласно коэффициенту, подается для повышения или понижения температуры. Со временем подбирается та величина, которая компенсирует внешние факторы, и скачки исчезают.
Интеграл используется для исключения ошибок путем расчета статической погрешности. Главное в этом процессе — подобрать правильный коэффициент, иначе ошибка (рассогласование) будет влиять и на интегральную составляющую.
ZONT — УМНЫЕ ПРИБОРЫ ДЛЯ БЕЗОПАСНОСТИ И КОМФОРТА
Часто задаваемые вопросы
Режим ПИД регулирования
В режиме ПИД регулирования достигается более точная установка регулируемой температуры теплоносителя.
Функция актуальна для термостатов, управляющих котлом в релейном режиме. При управлении котлом по цифровой шине, режим ПИД регулирования установлен по умолчанию.
Для применения режима ПИД регулирования подключите к термостату термодатчики воздуха и теплоносителя и укажите их в настройке «Датчики температуры»:

В «Настройках термостата» задайте Режим регулирования « по теплоносителю (ПИД) » и задайте пороговые значения.

ZONT анализирует скорость изменения текущей температуры в помещении относительно заданной, и вычисляет расчетную температуру теплоносителя.
Таким образом, регулирование работы котла осуществляется по показаниям термодатчика теплоносителя и расчётной температуре теплоносителя.


При использовании ПИД регулирования достигается более точная установка регулируемой температуры и более ровная температура теплоносителя в батареях. Но котёл при этом может тактовать. Для уменьшения тактования котла следует отрегулировать задержки управления котлом и гистерезис. Гистерезис в случае ПИД регулирования применяется к температуре теплоносителя.
Важно понимать, что для выхода ПИД регулирования в рабочий режим требуется некоторое время (обычно 2-5 часов).
ПИД регулятор, простым языком о сложном.
Эта тема зрела давно, и разбивать её на три части было бы не совсем правильно. Поэтому приготовьтесь, будет несколько видео, несколько примеров и вообще, смело добавляйте её в закладки. В конце статьи буду добавлять ещё ссылки на материалы позднее, а теперь поехали.
Про тему регулирования и управления знают все, кто планировал что-либо автоматизировать. Если взяться за любой процесс и его пытаться автоматизировать, то в первую очередь необходимо начинать с технологии процесса .
То есть необходимо, как минимум, понимать, что с чем связано, и как всё происходит. Только затем составлять технологическую схему, и далее уже вводить регуляторы .
Способов регулирования достаточно большое количество, но достаточно простой и надежный, а самое главное, проверенный временем — это ПИД регулятор.
Почему именно ПИД, а не П или ПИ, или ПД, они же проще, скажете вы. Отвечу просто: из ПИД всегда можно получить любые три из них. Тем более, большинство современных регуляторов созданы на программном уровне, и обрабатываются микропроцессором, а не на ОУ (операционных усилителях), как раньше. Хотя на ОУ тоже достаточно интересно.
Итак, для начала, поделюсь видеороликом, снятым зарубежным коллегой и переведенным на русский язык, но с моими добавлениями.
Поверхностное описание принципа работы ПИД-регулирования
Теперь вы немного знакомы с общей идеей, и мы движемся дальше. Для того, чтобы описать процесс в формулах, необходимо вспомнить или узнать что такое:
- сложение — просто складываем два сигнала (например 5 В и 3 В), или
- вычитание — аналогично первому, только со знаком минус
- умножение — умножение одного числа на коэффициент (пропорциональное регулирование)
- интегрирование у меня есть целая статья об этом (накопление статистики и расчет того, насколько недостаточно, или, наоборот, избыточно воздействие)
- дифференцирование (это показатель динамики системы — ускоряемся мы или тормозим).
Если с первыми тремя пунктами всё предельно просто, то со следующими уже необходимо разбираться и понимать, как они воздействуют на объект. Но лучше обо всем по порядку. Я предлагаю рассмотреть пример отопления дома.
1. У нас нет регулирования.
Пример простой, но в то же время достаточно наглядный. В тех домах, где есть центральное отопление, мы принимаем радиаторы как они есть. Для нас эта система не регулируема. Мы можем только открывать форточки или дополнять установкой конвектора, но в целом, как нам подали тепло из центрального отопления, так мы его и принимаем. Подробнее можно посмотреть в видеоматериале.
Тогда просто термостат будет управлять в режиме «греть — не греть» (так называемое двухпозиционное регулирование). Но и его, при желании, можно настроить очень точно.
3. Пропор2. Система простого регулирования (двухпозиционное регулирование).
В данном случае о процессе регулирования говорить можно, но совсем приближенно. Хотя в целом, система будет устойчивой.
- теплогенератор — он же газовый котел
- датчик температуры, лучше сказать чувствительный элемент — биметаллическая пластина, которая даёт команду котлу греть или не греть
- система радиаторов, через которые идет воздействие на температуру в доме.
В данном случае котел будет подобран таким образом, чтобы в пике нагрузки работать на 80% мощности. То есть если требуется 20 кВт, то его максимальная мощность будет 24 кВт.
Нам для теоретических предположений можно сделать несколько поправок. Всё тепло, выданное котлом в систему, в итоге останется в доме (с учётом КПД самого котла).
Идея достаточно проста. Мы можем выдавать управляющее воздействие на объект с мощностью от 0 до 100%. Если объект мы также можем и охлаждать, то можно сделать от -50 до +50%. Самое главное — выбрать вспомогательный коэффициент. Но лучше по порядку.
Пропорциональное регулирование хорошо можно понять по картинке:
У нас есть клапан А, рычаг В и шток С, прикрепленный к поплавку. Как только поплавок начинает подниматься , он тут же через крепление В начинает прикрывать клапан А. Если вода уходит из емкости, поплавок опускается, и через рычаг В поднимает клапан А. Менять коэффициент регулирования можно с помощью приближения или удаления В от А. Менять уставку можно, удлиняя или укорачивая шток С. Это пример для наглядности. Для математического описания используем немного другую схему.
Итак, схема у нас есть и на рисунке всё подписано, теперь перейдем к формулам. U(t) — это воздействие на объект (на схеме тоже есть), оно получается из умножения ошибки е(t) (на схеме еще как дельта Х) на коэффициент пропорциональности.
Особенность пропорционального регулирования в том, что при нем есть статическая ошибка. Она взялась оттуда, что мы никогда не компенсируем её через обратную связь. Каждый раз уменьшая разницу между входом и выходом, мы уменьшаем и воздействие на регулятор. Как итог, ноля мы никогда не достигнем.
Подробнее, а заодно и другие виды регулирования, можете посмотреть на видео:
4. Интегральное регулирование.
В основе любого интегрирования лежит процесс суммирования. То есть, в данном случае мы будем производить накопление ошибки.
Сделаю небольшую оговорку, сейчас мы разбираемся с медленно изменяющимся процессом, для того, чтобы понять смысл работы каждого звена. В реальных процессах изучение идет через частотные составляющие, и подход к обработке сигнала отличается от текущего.
В нашем случае интегрирующее звено имеет смысл рассматривать совместно с пропорциональным, где они дополняют друг друга в работе.
В данном случае мы накапливаем эту ошибку на протяжении всего участка и, в итоге, устремляем систему к балансу, то есть минимизируем ошибку. Если в пропорциональном звене у нас есть статическая ошибка (постоянное недорегулирование), то с таким звеном мы будем устремлять эту ошибку к нулю.
Как это работает: пока есть ошибка, воздействие будет расти. Если произошло перерегулирование (ошибка стала отрицательной), то мы будем снижать воздействие. В этом вся суть интегрирующего звена в данной троице.
5. Дифференциальное регулирование.
В данном регуляторе, если вы посмотрели видеоролик, вся идея дифференцирования — это прогнозирование, предвидение ситуации. Заключается она в том, что мы ловим динамику.
Суть производной — это угол наклона характеристики.
Логично предположить, , что, зная наклон в данной точке, мы можем понимать, куда стремится функция. Соответственно, принимаем решение о «торможении» или наоборот, поддержке, тем самым сглаживая переходные моменты.
Как итог, хочу продемонстрировать интересную гифку из википедии. Её разбор есть в видеоролике.
Итак, это было знакомство с ПИД регулятором для начинающих.
А правильнее сказать — для вялотекущих процессов.
В реальности, в системах регулирования расчет и построение передаточных звеньев строится немного другим образом.
Если всё было бы так просто, то чему так долго учиться в ВУЗе? Если предыдущие 5 пунктов вам понятны, или вообще показались легкотней, то добро пожаловать в пункт 6, где тезисно знакомимся с ключевыми моментами настоящей ТАУ.
для особо продвинутых и тех, кто считает себя гуру, после прочтения 6 раздела добро пожаловать в комментарии.
6. ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ — знакомство.
Итак, есть такая замечательная книга
Бесекерский В.А., Попов Е.П. Теория систем автоматического управления
её объем чуть более 700 страниц, чтобы её просто начать читать, я не говорю про понять, необходимо обладать следующими знаниями:
1.Пределы, производные и интегралы.
2. Линейные уравнения и матрицы.
3. Комплексные числа и работа с ними.
4. Различные частотные характеристики и передаточная функция.
То есть, если вы серьезно взялись за квадрокоптер, то банальным ПИД-ом тут не отделаться.
Вот пример из книги разбора интегрального звена(да да, там уже идут звенья)
При таком подходе изучение идет с точки зрения частотных характеристик сигнала. Так, например, любой усилитель — это набор звеньев, который должен пропускать и усиливать только необходимые частоты.
А такие формулы и преобразования:
для вас должны быть обыденными и типовыми.
Не сложно догадаться, что процесс моделирования — это, в первую очередь, понимание технологического процесса и знание азов высшей математики.
Я ни в коем случае не отговариваю Вас от того, чтобы идти дальше, наоборот, я показываю, где начинается настоящая динамика и робототехника.
Фактически мы с вами рассмотрели простое управление и реакцию с заглядыванием вперед. Возможно, чуть позднее еще добавлю ролик о другом ПИД регулировании.
Термоконтроллер с PID-регулированием в мирно-хозяйственных целях

По русски это понятие, кстати, сокращается в те же буквы — ПИД, Пропорционально-Интегрирующе-Дифференцирующая регуляция.
В инете множество статей, посвященных ПИД, но очень мало рассказывающих об этом понятными словами. Я не популяризатор, но постараюсь изложить принцип работы ПИД-регуляторов максимально доступно 🙂
ЗЫ: конкретные цифры на графиках могут не совпадать с цифрами в примерах, но принцип сохраняется 🙂
Представьте, что у нас есть банка с водой, температуру которой нужно поддерживать 70 градусов с помощью вставленного в эту банку нагревателя мощностью 100 Ватт. Для измерения температуры в воду опущен термометр.
Самый простой способ сделать это как раз применяется в однбаксовых терморегуляторах: включаем нагреватель, температура достигает заданной, выключаем нагреватель, температура падает ниже заданной — включаем нагреватель, и т.д.
Элементарнейший и дешевейший способ, не требующий никаких вычислительных ресурсов. На этом принципе делают как цифровые контроллеры, так и аналоговые, и даже механические. Однако есть у него большой недостаток — он не поддерживает более-менее точно заданную температуру. С таким регулятором температура воды в нашей банке будет гулять вокруг заданной, то превышая ее, то падая ниже. График температуры будет напоминать пилу. Это называется пороговый регулятор, то есть который включает или выключает нагреватель по достижении заданных порогов: 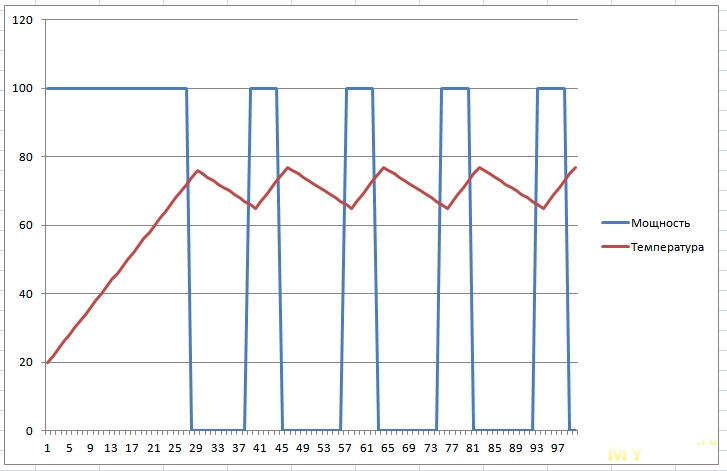
А что если не просто включать-выключать нагреватель, а регулировать его мощность — чем температура воды ниже заданной тем больше мощности подаем на нагреватель? Звучит логично и вот так у нас и начинает появляться ПИД 🙂 Точнее, появилась первая его составляющая Пс — пропорциональная, значение которой прямо пропорционально разнице между заданной и текущей температурами. Итак, будем выдавать на нагреватель значение Пс: при текущей температуре воды 20 градусов он выдаст в нагреватель 70-20=50 Ватт. Когда вода нагреется до 40 градусов, он уже будет выдавать 70-40=30 Ватт. При температуре воды 60 градусов он будет выдавать 70-60=10 Ватт. Отлично, никаких прыжков вокруг заданной температуры, все плавно 🙂 Однако есть одна закавыка: при мощности на нагревателе 10 Ватт он уже не может и дальше нагревать воду, а может только удерживать эти достигнутые 60 градусов. Итак, вода 60 градусов, Пс соответственно выдает 10 Ватт и температура воды стоит на месте, до 70 градусов с таким регулятором ей не добраться: 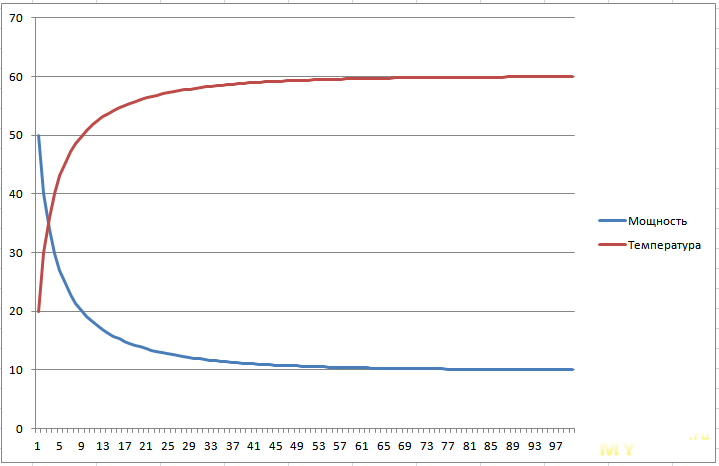
Нужно что-то добавлять к пропорциональной составляющей, какое-то значение, причем не постоянное. На помощь приходит Ис — интегрирующая составляющая. Это накопитель ошибок. При каждом измерении в него добавляется разница между заданной и текущей температурами. Если заданная температура больше, то добавляется положительное число, если меньше, то отрицательное. У этой составляющей есть заданное максимальное значение, превысить которое она не может, то есть если при очередном добавлении оказывается, что сумма превысит максимум, то Ис становится равной максимуму, но не больше. То же касается нуля — отрицательным числом она тоже не может стать. Пусть у нас этот максимум будет равен мощности нагревателя — 100. Теперь на нагреватель будет выдаваться суммарное значение мощности Пс+Ис. Для примера последовательность температур и что при этом получается:
1. Температура 20 градусов, Ис изначально равна нулю, Пс=70-20=50, в нагреватель выдается Ис+Пс=0+50=50 Ватт.
2. Вода нагрелась до 30 градусов, Ис=0(ее предыдущее значение)+(70-30)=40, Пс=70-30=40, в нагреватель выдается Ис+Пс=40+40=80 Ватт.
3. Вода нагрелась до 40 градусов, Ис=40(ее предыдущее значение)+(70-40)=70, Пс=70-40=30, в нагреватель выдается Ис+Пс=70+30=100 Ватт.
4. Вода нагрелась до 60 градусов, Ис=70(ее предыдущее значение)+(70-60)=80, Пс=70-60=10, в нагреватель выдается Ис+Пс=80+10=90 Ватт.
Смотрите-ка, пока все выглядит неплохо, вода уже 60 градусов, а нагреватель все еще греет воду, хотя и начал снижать мощность 🙂
5. Вода нагрелась до 70 градусов, Ис=80(ее предыдущее значение)+(70-70)=80, Пс=70-70=0, в нагреватель выдается Ис+Пс=80+0=80 Ватт.
6. Вода нагрелась до 80 градусов, Ис=80(ее предыдущее значение)+(70-80)=70, Пс=70-80=-10, в нагреватель выдается Ис+Пс=70+(-10)=60 Ватт.
Вода перегрелась. И хотя, как видно, мощность пошла вниз, температура еще будет какое-то время колебаться пока не успокоится на заданном значении: 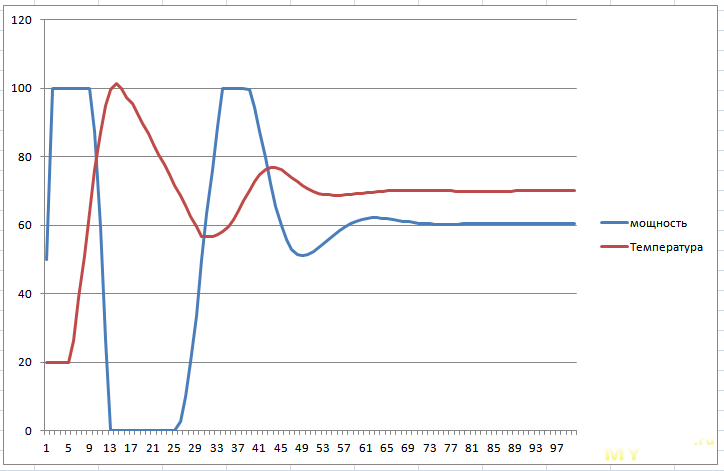
Это называется перерегулирование. Происходит оно из-за того, что и нагреватель и термометр и, главное, вода имеют какую-то инерцию, регулятор получает обратную связь (показания температуры) с определенным запаздыванием. При подаче на нагреватель полной мощности вода не нагреется мгновенно до 100 градусов, и точно так же она не остынет мгновенно при выключении нагревателя. Регулятор посмотрел на температуру — холодная вода, добавил мощности. Через 2 секунды глянул — все еще холодная — опять добавил. А когда в очередной раз он обнаруживает, что вода уже дошла до нужной температуры то начинает выдавать мощность, накопленную в Ис, считая, что это как раз нужное для поддержания температуры значение мощности (на самом деле интегрирующая составляющая после устаканивания всех возмущений действительно содержит значение, необходимое для ровного поддержания регулируемой величины, а пропорциональная призвана только компенсировать случайные отклонения). Но для воды это много и она продолжает нагреваться. И только после превышения заданной температуры регулятор начинает снижать мощность. И эта качка продолжается некоторое время пока значение Ис не придет к нужной величине.
Что можно предпринять в таком случае? Ну, например можно понизить влияние на выходную мощность Ис. Это называется коэффициент, у каждой составляющей ПИД может быть свой коэффициент, которым можно повышать или понижать влияние этой составляющей на выходной результат. Уменьшим влияние Ис до 0.3 от его значения — Ис*0.3: 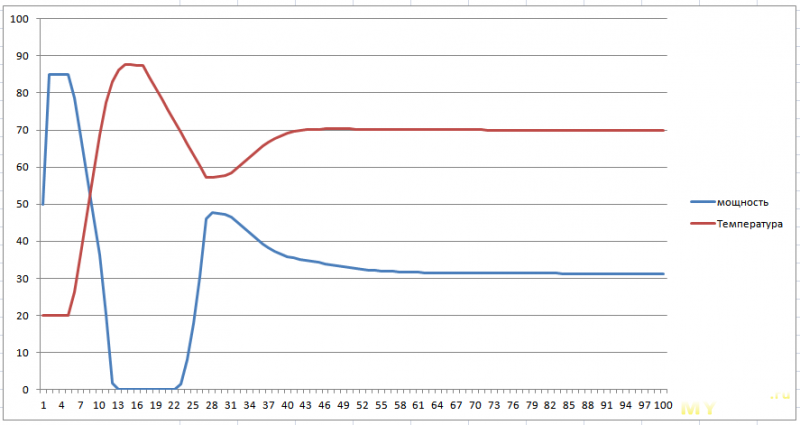
Уже лучше, но все равно есть колебание в начале. Это из-за слишком большого влияния пропорциональной составляющей, давайте уменьшим и ее влияние в 2 раз — Пс*0.5: 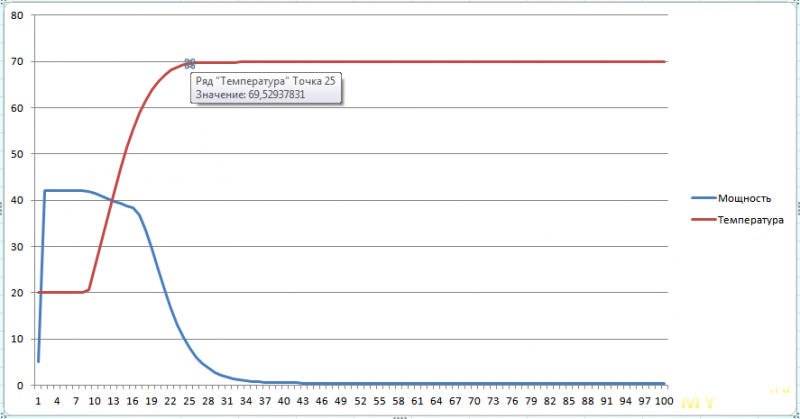
Идеально, правда? 🙂
Нуу… Почти. Колебаний нет, но вот время нагрева увеличилось. Оно пришло к заданной температуре только к 25-му отсчету.
На самом деле зачастую используют ПИ-регулятор, без его дифференцирующей части и это вполне работает, как видно. Однако часто можно добиться еще лучшего результата с использованием третьей составляющей — дифференцирующей, Дс.
Она является «демпфером», не дающим регулируемому устройству слишком быстро менять свое состояние. В нашем примере Дс начнет снижать выходную мощность тем сильнее чем быстрее будет нагреваться вода, иными словами она не даст «разогнаться» графику роста температуры настолько, чтобы он проскочил заданную температуру 🙂 При этом, пока до заданной температуры далеко влияние Дс не очень значительно на фоне других составляющих, температура может расти быстро. Но чем ближе она к заданной тем сильнее становится влияние Дс на фоне все уменьшающихся Ис и Пс.
Дс в отличии от Пс и Ис не прибавляется к выходному сигналу (в нашем примере- мощности), а вычитается из него. Она равна скорости изменения регулируемой величины (в нашем примере — температуры). Например, если в прошлый замер температура была 28 градусов, а в текущем замере она уже 31 градус, то Дс будет равна 3 — на столько температура выросла с прошлого замера, это скорость роста температуры. И это значение, возможно умноженное на свой коэффициент, вычитается из выходной мощности, потому эта составляющая и называется дифференцирующей 🙂
Вот что получится при добавлении Дс: 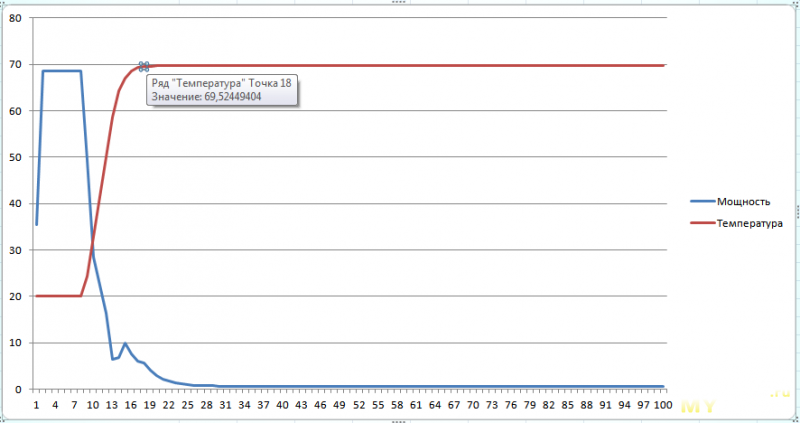
Как видно, температура вышла на режим гораздо быстрее и при этом без всплесков и колебаний. Попытку регулятора проскочить температуру вверх погасила как раз дифференцирующая составляющая.
Вот, если интересно, график изменения значений Пс, Ис и Дс в этом регуляторе в том же временном масштабе: 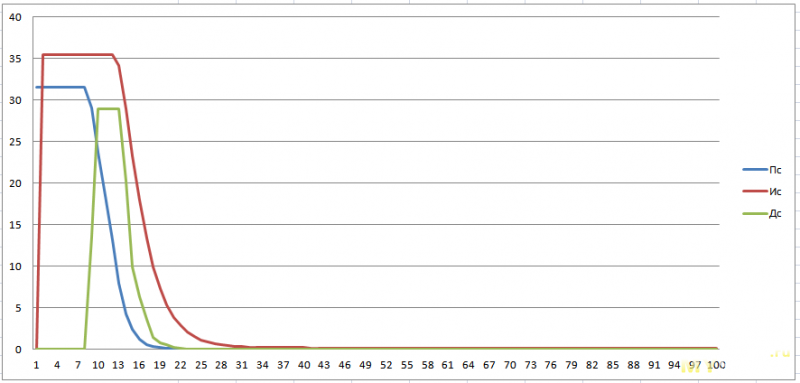
А вот что было бы без дифференцирующей составляющей при тех же условиях: 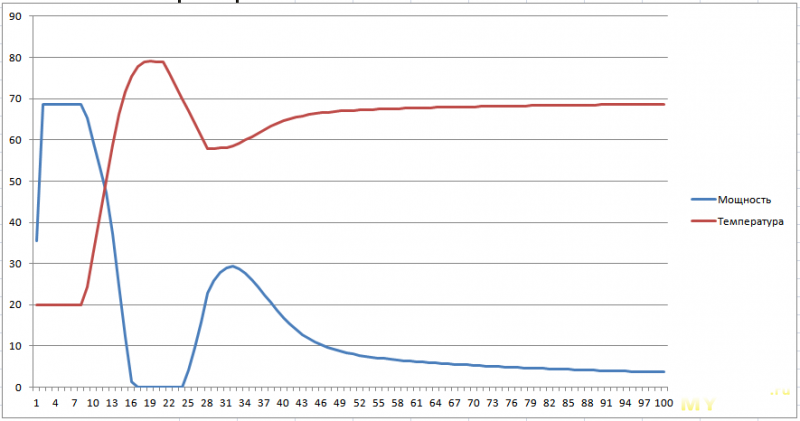
И еще раз коротким итогом 🙂
ПИД — это регулятор, который формирует сигнал воздействия на регулируемую величину из трех составляющих: пропорциональной, интегрирующей и дифференцирующей.
Пропорциональная составляющая добавляет в выходной сигнал сиюминутную разницу между заданной и текущей измеренной величинами (т.н. ошибку). Интегрирующая накапливает (интегрирует) разницы всех измерений и добавляет в выходной сигнал накопленное значение (но не превышающее заданного максимума). Дифференцирующая определяет скорость изменения регулируемой величины (на сколько она изменилась с прошлого измерения) и вычитает эту величину из выходного сигнала. Все три составляющие могут иметь свои коэффициенты, усиливающие или ослабляющие их влияние на выходной сигнал.
Уфф… 🙂 Ну, я говорил, что не являюсь популяризатором, поэтому за доходчивость своего изложения не отвечаю. Но я старался 🙂
ЗЫ: самое веселое заключается в подборе коэффициентов этих составляющих, т.к. без правильных (хотя бы примерно) значений этих коэффициентов ПИД-регулятор или вообще не будет регулировать или будет регулировать очень плохо. Подбор идеальных коэффициентов, как я понял, дело весьма нетривиальное. Пока я не встречал в инете доступное объяснение как их рассчитывать, в основном приводятся методики их экспериментального подбора. Что, впрочем, достаточно логично, т.к. для расчета нужно столько всего знать о регулируемом механизме, сколько о нем не всегда знают даже его создатели :))
Основные параметры этого регулятора (именно этой модели — REX-C100FK02-V*AN):
- питание — 24 вольта постоянного напряжения / 24 вольта переменного напряжения / 85-264 вольта переменного напряжения
- потребление — не более 9 VA при питании 240 вольт
- выход — напряжение, 12 вольт, сопротивление нагрузки 600 Ом и выше
- тип подключаемой термопары — K (в настройках можно выбрать целую кучу типов, но я не уверен, что железо универсальное и поддерживает всю эту кучу)
- диапазон регулирования температуры — 0-400 градусов Цельсия (зависит от типа термопары)
- выход аварийной сигнализации — один выход, реле на замыкание
- период цикла регулирования — 0.5 сек
- метод регулирования — PID, вкл/выкл (дискретный), P, PI, PD (настраивается)
- вес — около 170 грамм
- крепление — в отверстие панели
Вот русскоязычный мануал на этот контроллер (нашел где-то в сети) — drive.google.com/open?id=1HDs7UX5rllDy8GFdYrdINbcGI_Snoo00
А вот качественный англоязычный, чуть более полный, но по настройкам немного не соответствует — drive.google.com/open?id=1Ez—F-3hjLzNtKP36FkGy6vfGQ_AkPkn
И пролежал бы он у меня еще неизвестно сколько, если бы жена не пожаловалась, что в нашей электродуховке она не может запекать полимерную глину — температуру там нормально не выставить. Да и пироги порой подгорают 🙂 Духовка из самых дешевых, увы 🙂 И я вспомнил об этом контроллере. Мне он не понадобился, слишком примитивен, а вот для духовки — самое то. Но решил я не курочить духовку, а сделать отдельную коробочку с этим регулятором и твердотельным реле на 40 ампер. Точно такое же реле уже год трудится у меня на почти такой же духовке (переделанной в паяльную печь) и не жужжит.
Крепится контроллер очень просто — вставляется в панель и с обратной стороны поджимается рамкой с защелками. Рамка снабжена пружинными рычажками, поджимающими регулятор: 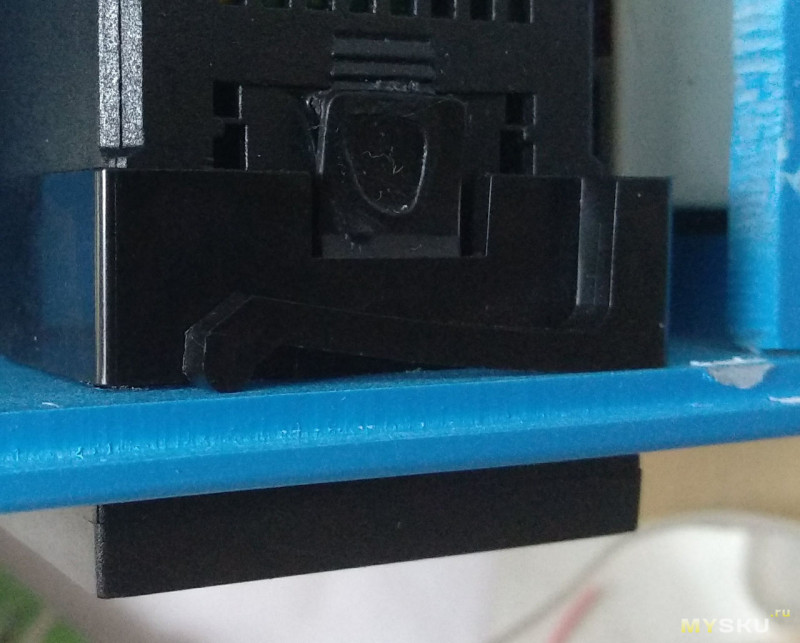
Все подключения производятся через винтовые клеммы на задней стенке: 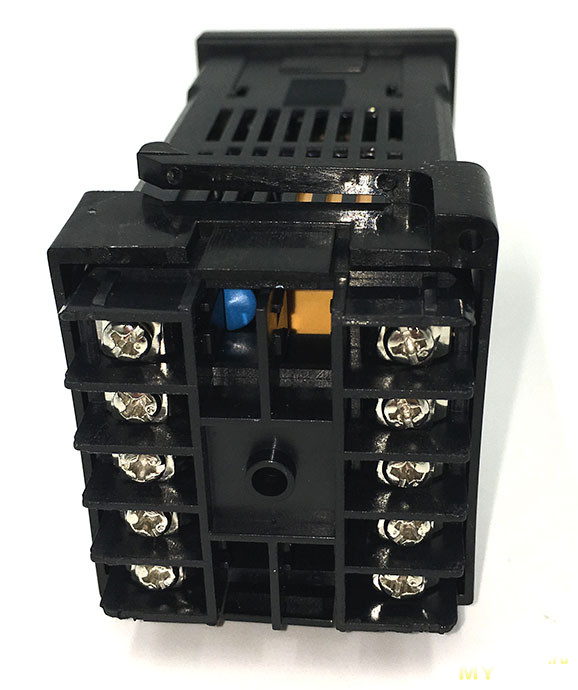
Подключение очень понятно расписано как на наклейке на корпусе контроллера, так и в мануале. 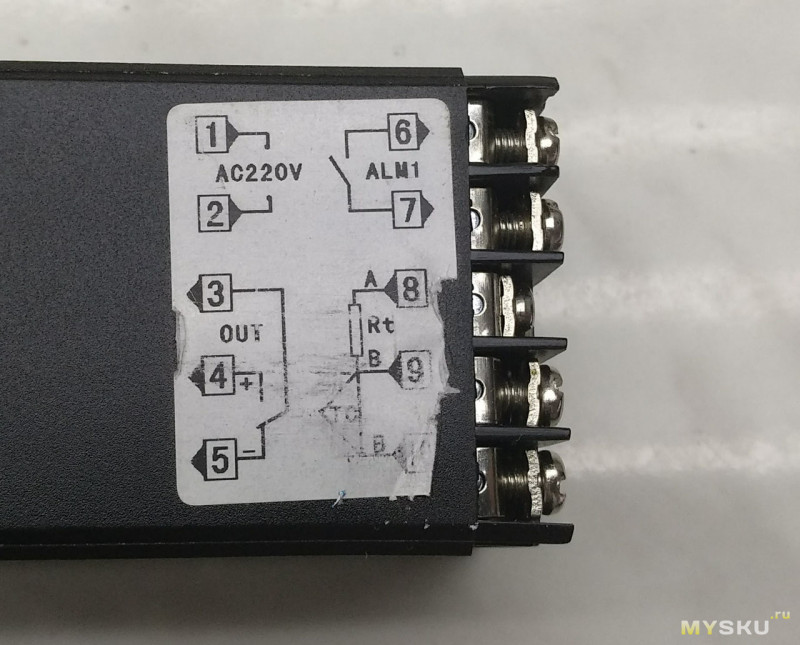
Меня интересует: питание (220 вольт), выход управляющего напряжения (прямиком на твердотельное реле), вход термопары.
При желании можно еще подключить выход аварийной сигнализации. Ее можно отключить или настроить на один из режимов:
- превышение заданной температуры
- падение ниже заданной температуры
- попадание в заданный промежуток температуры
- выход за заданный промежуток температуры
Это может быть полезно, например, для аварийного отключения питания нагревателя, на случай если будет пробит ключ, управляющий нагревателем (мосфет, твердотельное реле) и начнется неконтролируемый разогрев.
Разбирается контроллер очень легко и даже без применения инструментов. Для этого нужно нажать защелку на корпусе (у нее даже есть выступы для нажатия пальцем): 
и потянуть корпус, второй рукой удерживая рамку передней панели: 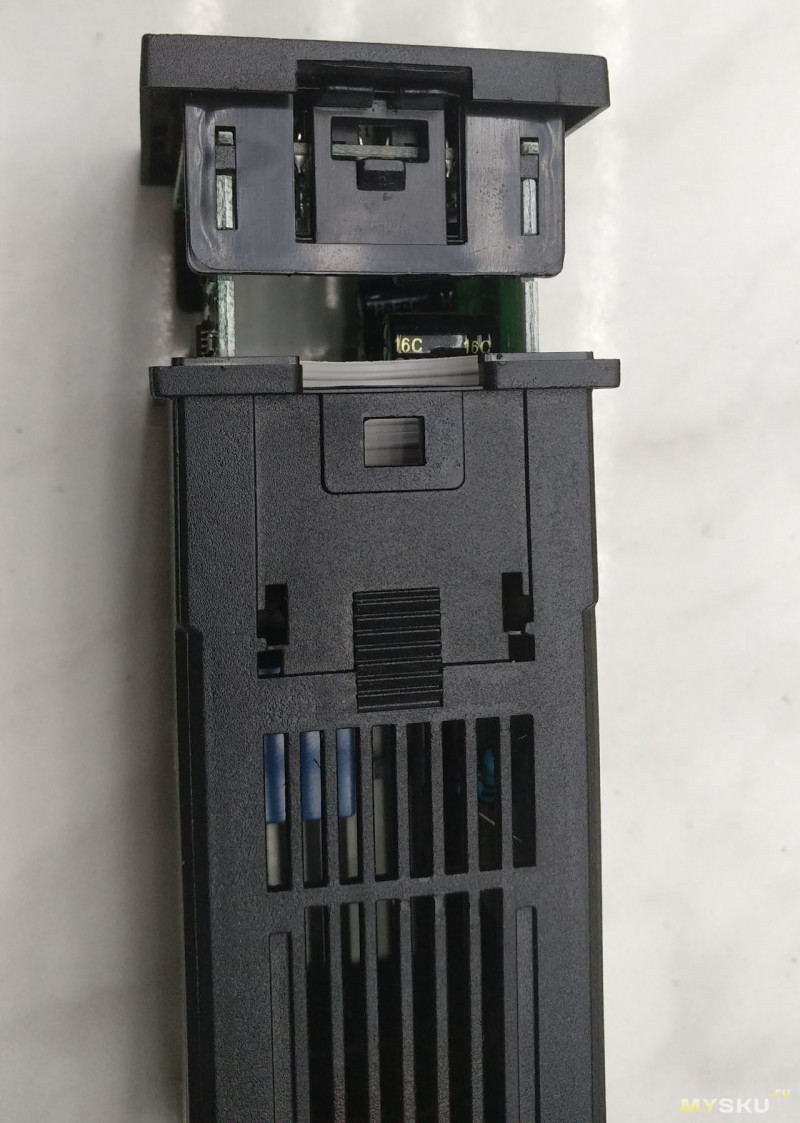
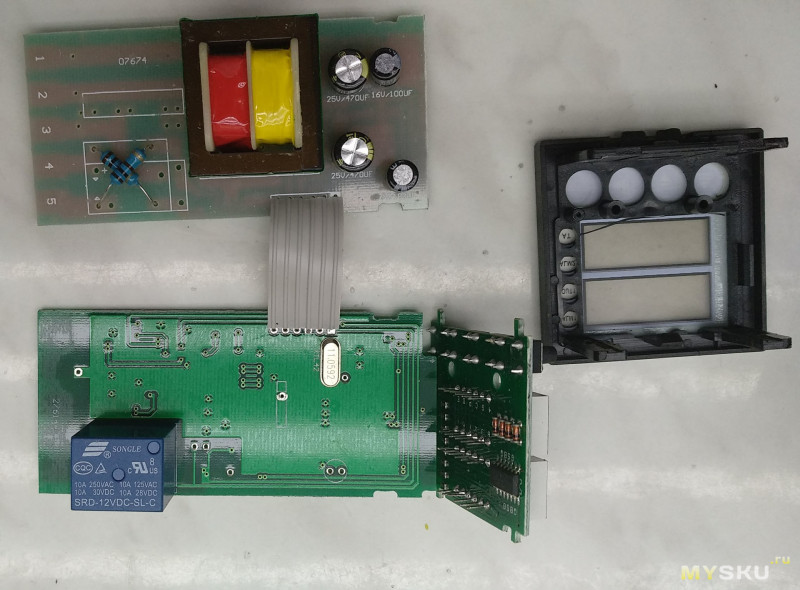
Контроллер состоит из трех плат: собственно управляющая, блок питания и дисплей с кнопками. Платы управления и БП соединяются довольно жестким шлейфом, плата дисплея припаяна к плате управления: 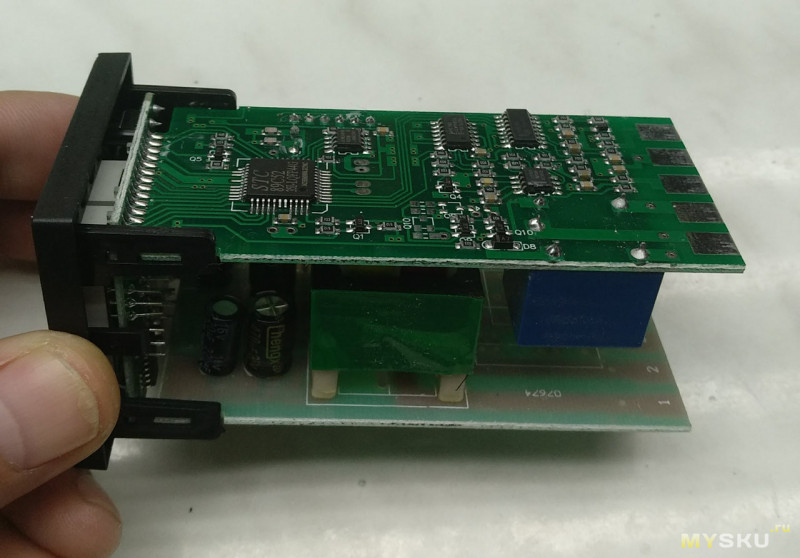
С клеммниками платы соединяются через скользящие контакты: 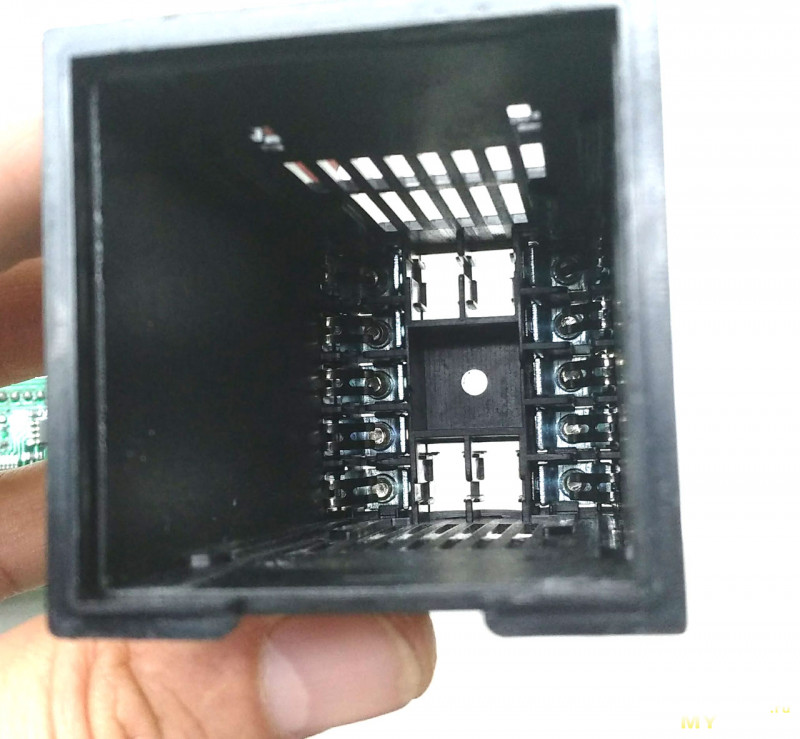
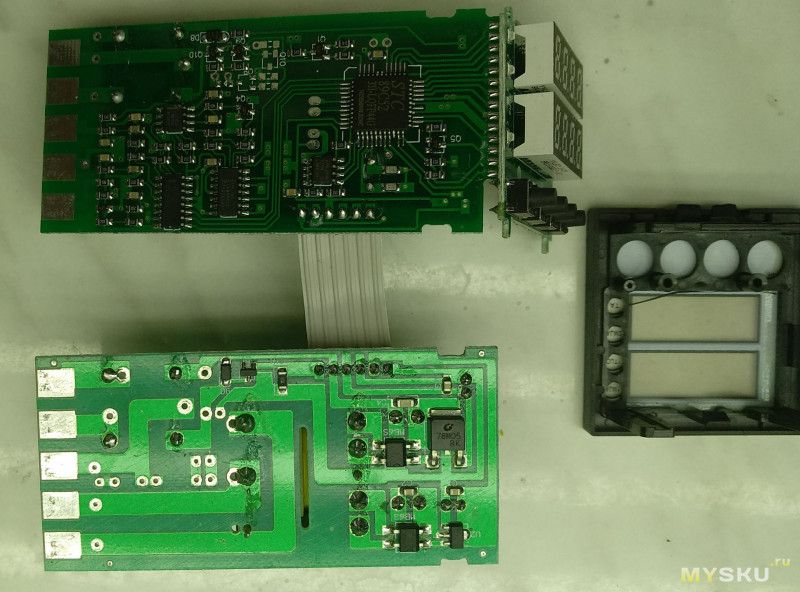
Платы крупнее: 
Общий план был такой — отдельная коробочка с контроллером и твердотельным реле на радиаторе, из нее выходят два силовых провода с вилкой и розеткой (да, розетка на проводе) и термопара. Термопара вставляется в духовку и зажимается ее дверцей, изоляция у термопары термоупорная, ничего ей не будет 🙂
Сначала мелькнула мысль напечатать корпус на 3D-принтере, но печатать такой размер из ABS на моем открытом всем сквознякам Anet A8 — геморрой, а PLA, размягчающийся уже при 55-60 градусах рядом с духовкой долго не проживет. Решил резать из литого поликарбоната толщиной 6 мм, их у меня есть несколько листов 50х50 см 🙂
Для начала нарисовал модель (стакан для масштаба): 
Вот так оно будет собираться: 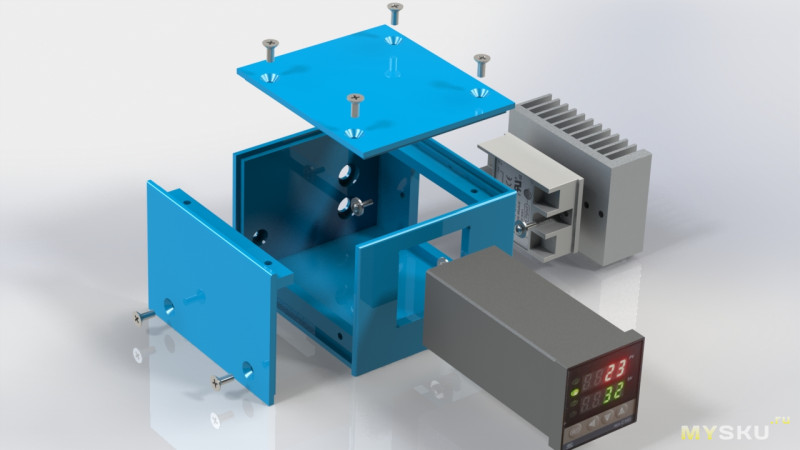
Верхняя крышка и одна стенка съемные, на винтах, остальное клееное. Правда, уже потом, когда все было сделано, до меня дошло, что лучше бы было сделать съемным дно, а не крышку, но переделывать не стал 🙂
Вырезал на фрезерном станке, так что размеры сошлись идеально. Неидеально сошлась только толщина, которая оказалась 5.9 мм вместо 6. Для более прочной склейки (или чтобы думать что так более прочно) по краям стенок сделал проточки, так что стенки соединяются полупазами: 
И вот кучка запчастей готова к дальнейшей работе: 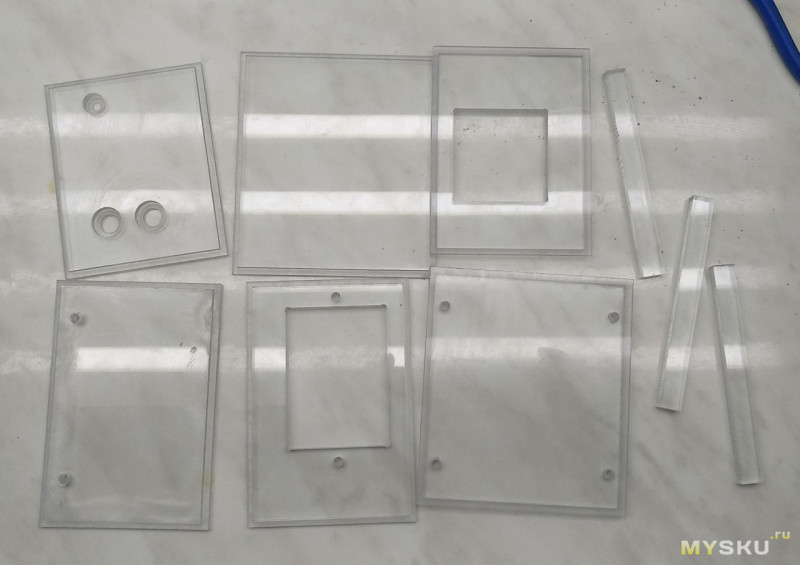
Сначала думал обклеить самоклейкой, но во-первых в магазине мне не попалась пленка нормального цвета, только цветочки да тканевые узоры, а во-вторых я не был уверен, что смогу обклеить без складок и щелей, так что решил красить.
Предварительная примерка показала что все сходится, поэтому закрепил стенки малярным скотчем и проклеил все стыки. Клеил дихлорметаном, держит железно. Набрал его в шприц с иглой, у которой отрезал скошенный носик, и прошелся иголкой по всем стыкам изнутри (даже по одному стыку, который не надо было клеить, увлекся :)). Дихлорметан очень текуч — моментально заполняет мельчайшие щели, и очень интенсивно испаряется, так что даже не пришлось давить поршень, тепло рук нагревало дихлорметан достаточно, чтобы его испарения создавали избыточное давление внутри шприца.
Сохнет: 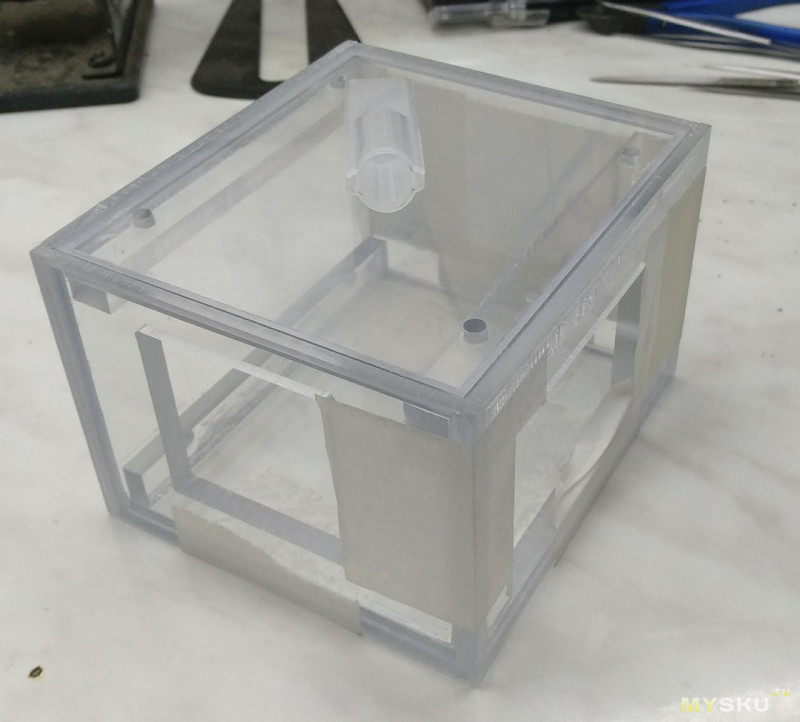
А пока корпус сох, я откопал у себя кусок радиатора, который когда-то зачем-то заказывал на али (уже даже не помню зачем). По размерам он подошел идеально, разве что по длине пришлось отпилить нужный кусок. 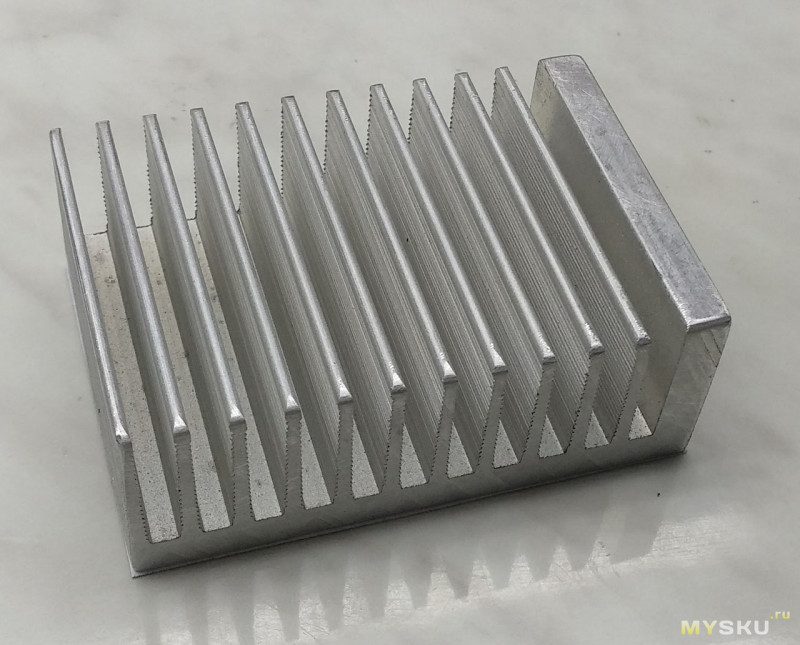
Распечатал шаблон отверстий, прихватил его кусочками двухстороннего скотча к радиатору и просверлил отверстия: 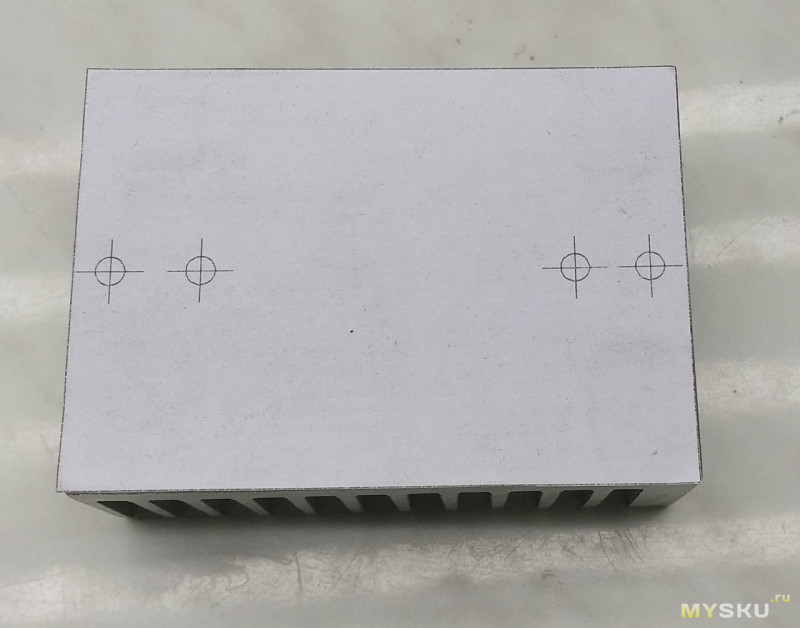
После чего обнаружил, что слегка неправильно нарисовал модель твердотельного реле, и отверстия на радиаторе теперь не совсем совпадают с отверстиями в реле. К счастью, я ошибся очень удачно — во-первых не совпадало только одно отверстие, а во-вторых оно не совпадало так сильно, что совершенно не мешало просверлить правильное 🙂 Так что все обошлось просто лишним отверстием 🙂
Через час корпус уже был достаточно прочным, чтобы можно было спокойно его крутить и примерять. И вот тут я обнаружил свой второй прокол в модели: сам-то контроллер по габаритам я нарисовал верно, а вот крепежную рамку с защелками рисовать не стал. И оказалось, что она теперь мешает крышке закрыться примерно на 3 мм. Пришлось класть крышку в станок и фрезеровать на ее внутренней стороне выемку.
Еще одна моя ошибка была в том, что узкие планки, которые я приклеил к стенкам и к которым должны прикручиваться крышки, я вырезал без отверстий для болтов. Решил, что приклею, а потом по месту просверлю. Сверлить ровно и именно там где наметил никогда не было моей сильной стороной. Короче, почти все отверстия в этих планках уехали. Из-за этого пришлось разбивать сверлом отверстия в крышках и зенковкой пытаться профрезеровать скосы для шляпок в ту же сторону 🙂 Получился слегка колхоз…
Кстати, резьба в поликарбонате держит болты очень хорошо, никаких гаек не нужно.
Перед покраской слегка закруглил грани с помощью напильника и шкурки, процесс очень быстрый и легкий.
В процессе покраски я не делал фото, как-то забыл об этом, да там ничего интересного, в общем-то, и нет. Шкуркой заматировал поверхности, обезжирил, покрыл двумя слоями грунта и потом двумя слоями краски. 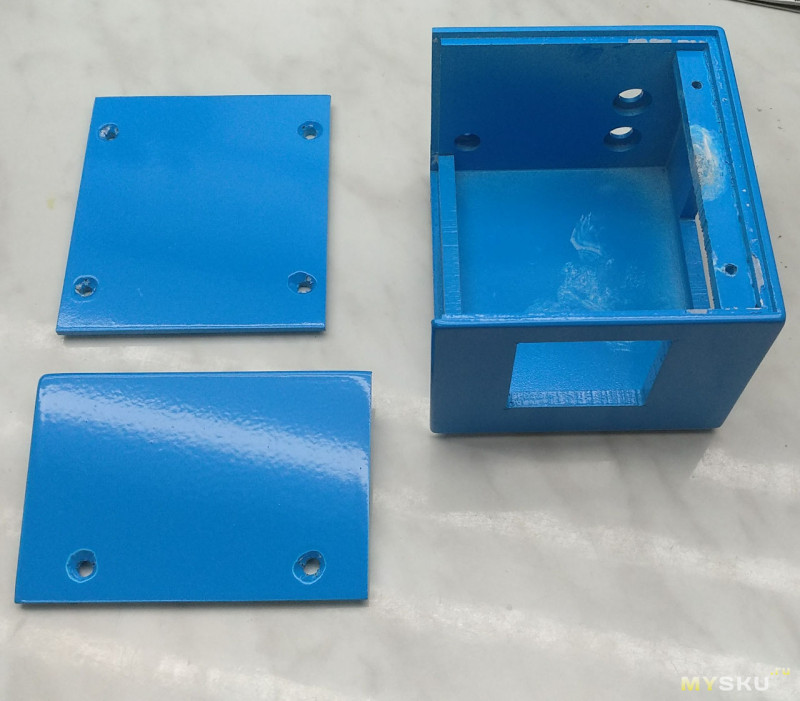
Почему такой цвет? А фиг его знает 🙂 Просто кроме этого у меня были лишь черный, синий, красный и зеленый, а они мне не нравились в данном случае 🙂 Ну и почему бы и нет 🙂
В отверстия для проводов я вставил специальные резиновые шайбы для таких случаев, брал их тоже на али: 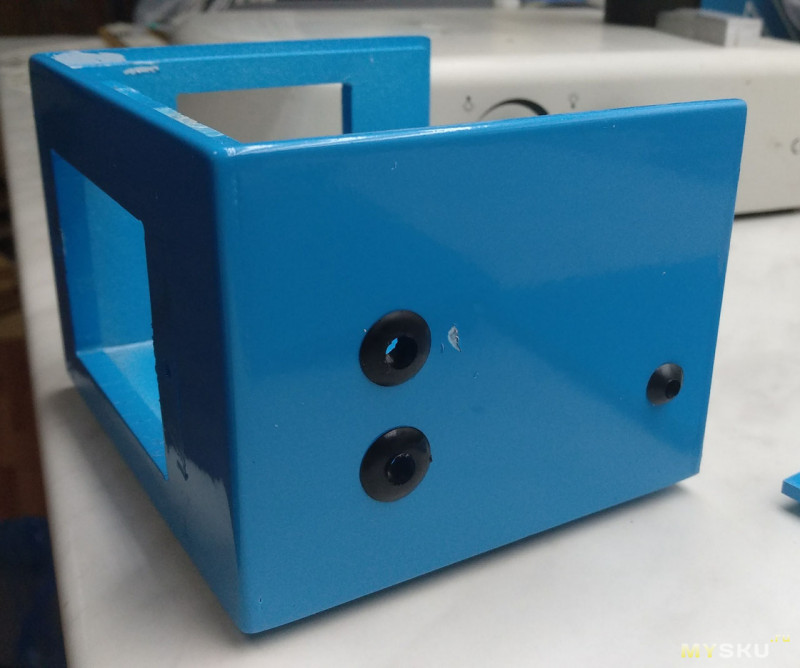
(коцка — это результат моего нетерпения, полез ковырять корпус когда краска еще не высохла окончательно)
Так как они не предназначены для панелей толщиной 6 мм, пришлось с внутренней стороны делать под них выемки, оставляя стенки толщиной 1 мм: 
Затянул в отверстия силовые провода, соединил заземление и одну из жил, из которой сделал отвод для запитки контроллера, как и от одной из вторых жил, идущей от вилки, прикрутил реле на термопасту к радиатору, а радиатор к корпусу: 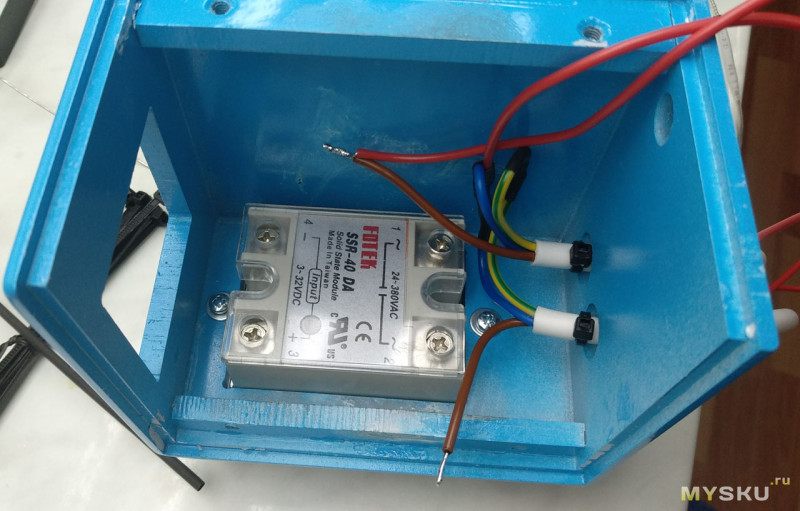
Дальше все просто — провода к реле, отмерить длину проводов до контроллера, отрезать, зачистить, залудить, прикрутить…
Все провода, выходящие из корпуса я обтянул изнутри стяжками чтобы их случайно не выдернули. Стандартная практика.
Все соединил и включил посмотреть не бахнет ли что-нибудь салютом. Не бахнуло: 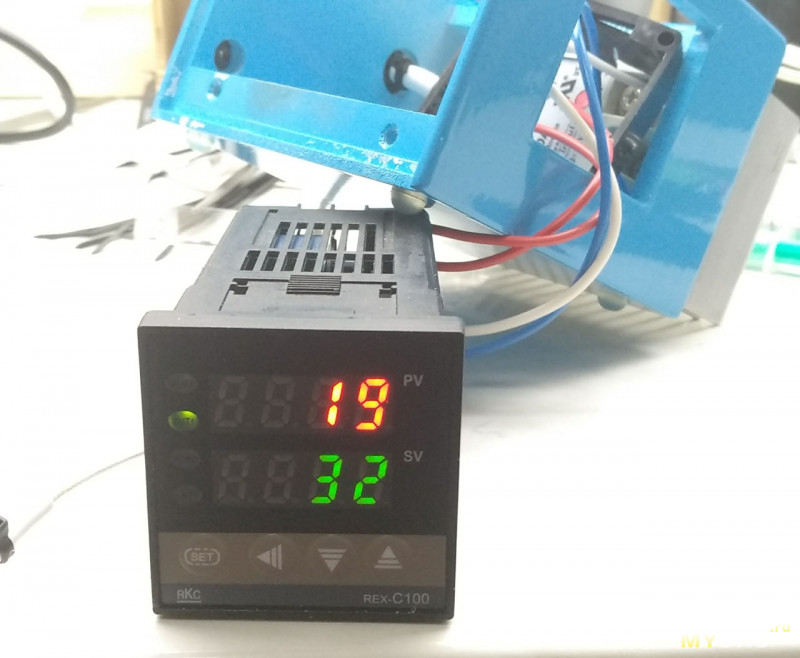
Там в глубине корпуса можно увидеть светящийся индикатор реле, значит все нормально, можно собирать 🙂 
Для начала я решил устроить ему стресс-тест и подключил к нему вот такой тепловентилятор на 3 кВт: 
Термопару при этом я посадил на радиатор реле и закрепил кусочком каптона чтобы контролировать температуру не только на ощупь.
Включил, тепловентилятор зажужал, а я пошел писать спойлер про ПИД-регулятор, время от времени отвлекаясь и проверяя температуру радиатора. Через 15 минут после старта температура дошла до 50 градусов. Еще через 20 минут она была уже 67 градусов и на этом значении продержалась следующие 30 минут пока я не выключил все это — в офисе стало жарко 🙂 Вердикт — с духовкой 1.5-2 кВт справится без проблем 🙂
Повседневное (когда не нужно менять какие-то глубокие настройки) управление этим контроллером очень простое. Сразу после подачи питания она начинает пытаться регулировать температуру, отдельного включения для этого не предусмотрено.
Вообще передняя панель минималистична: 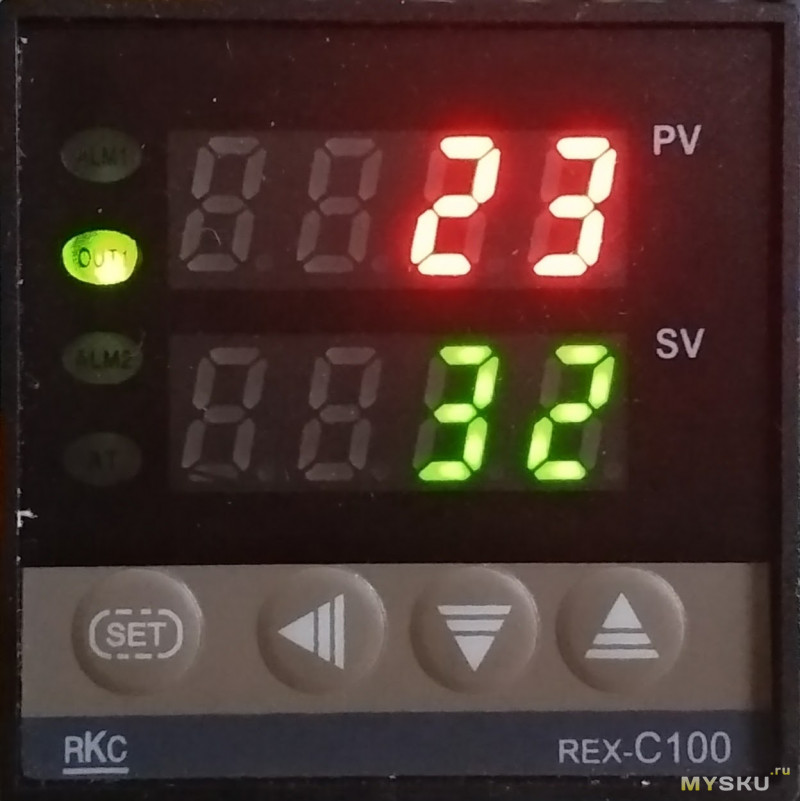
Верхний, красный дисплей — измеряемая (текущая) температура
Нижний, зеленый дисплей — заданная температура
Индикаторы слева по порядку сверху вниз:
1. Аварийная сигнализация 1
2. Выходной сигнал
3. Аварийная сигнализация 2
4. Индикатор работающей автонастройки PID
Кнопки слева направо: «настройка», «сдвиг», «вверх», «вниз».
Для установки заданной температуры нажимаем «настройку», все разряды нижнего дисплея кроме младшего начинают мерцать. Кнопками «вверх» и «вниз» выставляем в младшем разряде нужную цифру и нажимаем «сдвиг», теперь мерцают все разряды кроме десятков, настройка сдвигается на разряд влево. И так выставляем нужные цифры во всех разрядах. Для окончания настройки нажимаем еще раз «настройку».
Как я писал в спойлере про PID-регулятор, коэффициенты такого регулятора — дело тонкое и подбирать их нужно для каждого случая. Изначальные настройки коэффициентов в этом регуляторе скорее всего не подойдут под ваше применение, нужно подбирать свои. Эти коэффициенты и другие параметры в регуляторе можно изменить в более глубоких настройках. Чтобы войти в этот режим нажмите и удерживайте кнопку «настройка» 3-4 секунды.
На верхнем дисплее название параметра, а на нижнем — текущее значение этого параметра. Настройка значения производится так же, как и настройка температуры — кнопками вверх-вниз меняем текущий разряд, потом кнопкой сдвига переходим к следующему и т.д. Для перехода к следующему параметру нажимаем «настройку». Для сохранения всех настроек и выхода из этого режима жмем и удерживаем 3-4 секунды кнопку «настройка».
Список параметров в той последовательности в которой они перебираются:
- AL1 — настройка выхода первой аварийной сигнализации (в этой модели она одна, второй нет).
- AГU — автонастройка PID
- P — коэффициент Пс (пропорциональной составляющей ПИД), когда выставлен в 0 контроллер работает в дискретном режиме регулирования
- I — коэффициент Ис (интегрирующей составляющей ПИД), когда установлен в 0 контроллер работает в режиме ПД
- d — коэффициент Дс (дифференцирующей составляющей ПИД), когда установлен в 0 контроллер работает в режиме ПИ
- Ar — насколько я понял, этот параметр задает максимум Ис, но не уверен, что понял правильно.
- Г — тоже не совсем понял этот параметр, но похоже, что это период, с которым происходит измерение текущей температуры и соответствующее изменение выходного сигнала
- SC — тут можно подкорректировать показания термопары, это значение добавляется к ним. Может быть как положительным, так и отрицательным числом.
- LCK — блокировка настроек, 0000 — все настройки доступны, 0001 — изменить можно только заданную температуру и AL1, 0011 — изменить можно только заданную температуру, 0111 — изменить ничего нельзя.
и далее опять по кругу, начиная с AL1.
И в этих настройках можно изменить коэффициенты ПИД на требуемые. Однако чтобы знать на что их менять нужно очень хорошо понимать что делаешь и как это отразится на работе контроллера, или же долго и нудно перебирать их в надежде наткнуться на правильные значения. И чтобы облегчить жизнь простым смертным в контроллере предусмотрена автоматическая настройка этих коэффициентов.
Порядок проведения автонастройки:
Все условия должны быть приближены к реальным. То есть если Вы настраиваете для использования с духовкой, то духовка должна быть подключена, закрыта и температура на контроллере должна быть выставлена на максимальную (можно процентов на 10 меньше) из того диапазона, который предполагается применять в духовке. В процессе настройки контроллер нагреет духовку до этой температуры и подержит ее некоторое время.
Итак, подключили духовку (но пока не включаем ее нагреватели), выставили температуру (я установил 180 градусов), заходим в настройки, перебираем пункты пока не появится AГU, выставляем в 1 младший разряд и выходим из настроек. Начинает мигать индикатор AT. Теперь включаем нагреватели духовки и ждем пока мигание AT прекратится. Контроллер нагревает духовку постоянным нагревом до заданной температуры, выключает нагрев и следит за тем на сколько и как быстро температура превысит заданную после выключения нагрева. Исходя из скорости нагрева, «перескока» температуры и скорости дальнейшего остывания он и вычисляет коэффициенты ПИД. Этот процесс он может повторить 2-3 раза для уточнения.
Процесс автонастройки категорически рекомендуется после покупки или после изменения условий работы (другой нагревательный прибор, что-то изменили в текущем нагревателе и т.п., то есть все, что влияет на процесс нагрева). У меня до автонастройки контроллер вообще не мог довести температуру духовки до заданных 180 градусов. Провел автонастройку (видео ускороено в 10 раз):
И работа контроллера после этого (тоже ускорено в 10 раз):
Как видно, ПИД остался настроен не совсем оптимально (а никто и не обещал идеала :)), температура перескакивает по инерции заданную аж на 10 градусов. В дальнейшем при желании можно подкорректировать вычисленные им коэффициенты (что я и сделаю на домашней духовке), но при этом нужно понимать что и зачем менять.
Кстати, тот второй, более продвинутый контроллер (он видел слева на видео) справился с автонастройкой гораздо лучше, ничего корректировать не пришлось, перескок температуры на 200 градусах не превышает 2-3 градусов.
Есть и еще один уровень настроек, вход в него осуществляется нажатием и удержанием в течении 3-4 секунд одновременно кнопок «настройка» и «сдвиг». Но туда без необходимости лучше не лазить, а при необходимости внимательно сверяться с мануалом 🙂
Результат всей этой возни 🙂 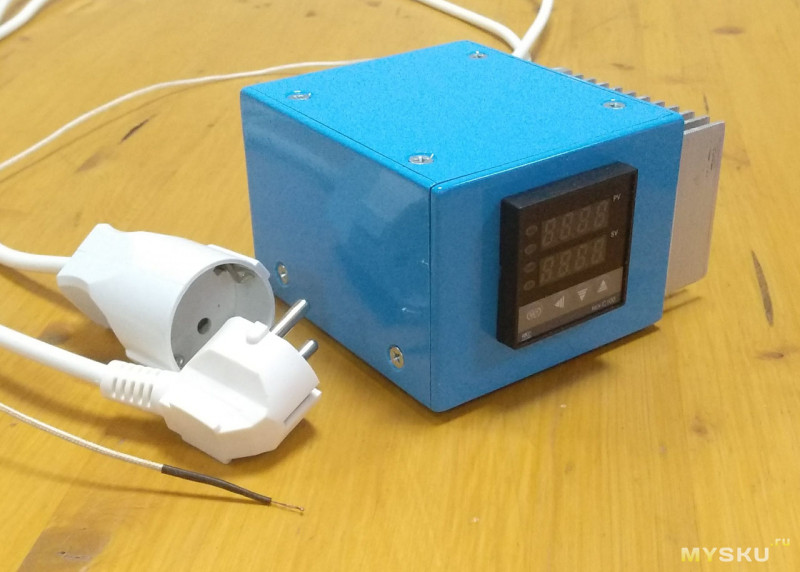


Итог:
Контроллер своих денег стоит и с работой справляется очень неплохо, особенно если настроить его чуть более тонко, чем предполагает автонастройка. Твердотельное реле тоже отлично справляется с достаточно большой нагрузкой, хотя насчет заявленных 40 ампер у меня очень большие сомнения. Максимум 20, да и то с хорошим радиатором и его активным охлаждением.