- Автоматическое регулирование напольного отопления. Часть 2
- Пид регуляторы для теплого пола
- Что такое ПИД регулятор для чайников?
- Что такое ПИД регулятор?
- Три коэффициента ПИД регулятора и принцип работы
- ПИД регулятор, простым языком о сложном.
- 1. У нас нет регулирования.
- Тогда просто термостат будет управлять в режиме «греть — не греть» (так называемое двухпозиционное регулирование). Но и его, при желании, можно настроить очень точно.
- 3. Пропор2. Система простого регулирования (двухпозиционное регулирование).
- 4. Интегральное регулирование.
- 5. Дифференциальное регулирование.
Автоматическое регулирование напольного отопления. Часть 2
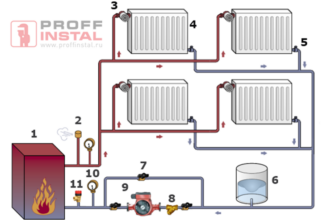
Если рассмотреть классическую схему простого автоматического управления комбинированной системой отопления (рис. 1), в которой комнатные термостаты управляют сервоприводами термостатических клапанов коллекторных блоков, то возникает вопрос: что случится, когда все клапаны окажутся закрытыми?
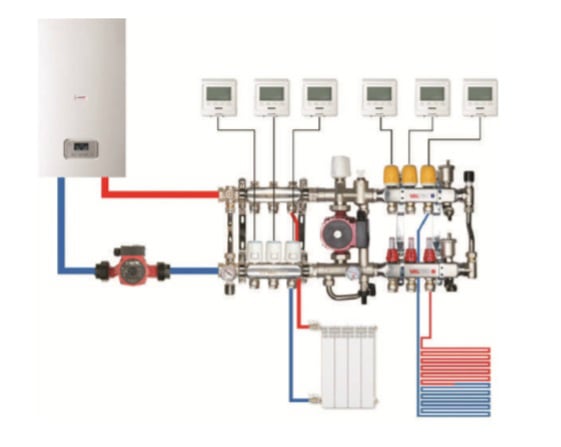
Рис. 1. Регулирование комбинированной системы отопления с помощью комнатных термостатов и сервоприводов
Очевидно, что в этой ситуации откроются перепускные клапаны на контурах и теплоноситель будет циркулировать по малым циркуляционным кольцам через байпасы. При этом насосы будут расходовать электроэнергию впустую. Если же контуры не оборудованы байпасами с перепускными клапанами, то циркуляционные насосы будут работать «на закрытую задвижку», тратя энергию только на нагрев самих себя и теплоносителя в ограниченном пространстве. Циркуляционные насосы VT.RS оборудованы встроенными датчиками перегрева, которые отключат насос при нагреве обмотки статора свыше 150 °С, однако это является аварийным режимом, и его регулярное повторение всё-таки приведёт к межвитковому замыканию обмоток.
В насосно-смесительном узле VT.DUAL на этот случай предусмотрен предохранительный термостат, который отключает насос при достижении заданной пользователем температуры (от 30 до 90 °С), но у остальных узлов такого термостата нет.
Для предотвращения работы насоса «вхолостую» и «на закрытую задвижку», а также для удобной увязки работы сервоприводов с остальным оборудованием системы отопления разработан зональный коммуникатор VT.ZC8 (рис. 2).

Рис. 2. Зональный коммуникатор VT.ZC8
К коммуникатору подводятся провода от каждого комнатного термостата, и он передаёт принимаемые сигналы на соответствующий сервопривод или группу сервоприводов. При отсутствии запроса на отопление (все термостатические клапаны коллектора находятся в закрытом положении), коммуникатор отключает циркуляционный насос или теплогенератор (в зависимости от тепломеханической схемы системы).
Коммуникаторы выпускаются двух типов: для сервоприводов с питающим напряжением 24 и 220 В.
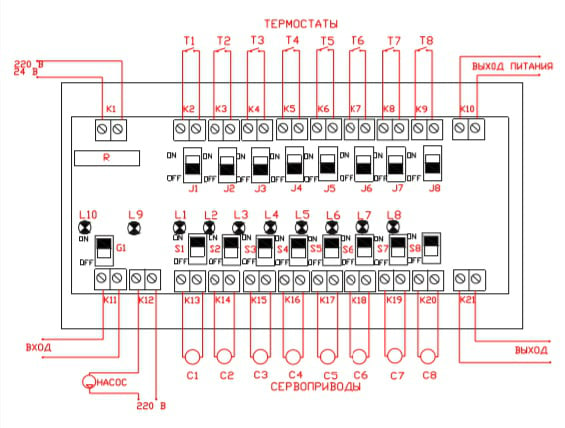
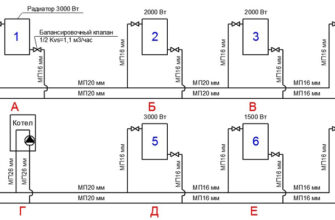
Рис. 3. Пример схемы подключения коммуникатора VT.ZC8
Назначение клеммных пар, переключателей и светодиодов в коммуникаторе следующее (рис. 3):
К1 – подача электропитания (220 В или 24 В в зависимости от модификации коммуникатора;
К2–K9 – подключение комнатных термостатов. К одному коммуникатору можно подключить восемь термостатов;
J1–J8 – переключатели передачи сигнала. В положении OFF управляющий сигнал передаётся на клеммную пару управления сервоприводами, расположенную напротив (K2–K13–C1; K3–K14–C2 и т.д.). В положении ON сигнал на клеммную пару управления сервоприводами передаётся от соседнего (расположенного cлева) термостата. Это позволяет одним термостатом управлять сразу несколькими сервоприводами. Например, на рисунке 3 сервоприводами С2, С3 и С4 управляет один термостат Т2 через клеммную пару К3, а сервоприводами С5, С6 и С7 управляет термостат Т3 через клеммную пару К6;
К10 – передаёт питание на соседний коммуникатор при объединении их в группы (рис. 4);
К11 – при объединении нескольких коммуникаторов принимает информацию о состоянии сервоприводов от соседнего коммуникатора для управления циркуляционным насосом;
К12 – управление циркуляционным насосом. При подаче команды закрытия сервоприводов на всех клеммных парах насос отключается;
К13–K20 – подключение сервоприводов термостатических клапанов коллектора;
J9–J16 – переключатели типа сервопривода. В положении OFF подключаются нормально закрытые приводы, в положении ON – нормально открытые;
К21 – передача информации о состоянии сервоприводов на соседний коммуникатор при объединении их в группы (рис. 4);
G1 – переключатель принудительного отключения насоса (ON – насос включён для управления коммуникатором; OFF – насос принудительно выключен);
S1–S8 – индикаторы горят при подаче питания на привод;
S9 – индикатор горит при подаче питания на клеммную пару K1;
S10 – индикатор горит при включённом циркуляционном насосе.
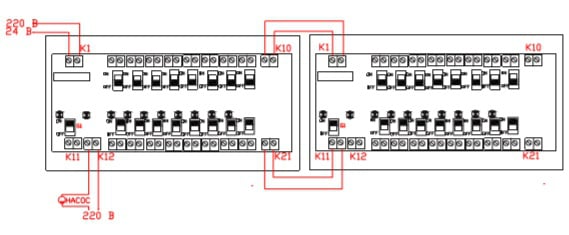
Рис. 4. Схема соединения двух коммуникаторов
Пид регуляторы для теплого пола
__________________
C уважением, LordN
Замучаетесь настраивать эту систему. А так-то канонически верно.
Воспользуйтесь Конструктором ИТП, сделайте контур отопления. Вам там и график будет и регулирование подачи.
__________________
Добро всегда побеждает зло. Кто победил — тот и добрый.
Замучаетесь настраивать эту систему. А так-то канонически верно.
Воспользуйтесь Конструктором ИТП, сделайте контур отопления. Вам там и график будет и регулирование подачи.
Включите срезки в графике, задайте максимум 50С или, при желании, чуть ниже.
__________________
Добро всегда побеждает зло. Кто победил — тот и добрый.
1) Датчики:
— температура обратки,
— температура воздуха (в пульте на высоте 1,5 м),
— реле давления (перед насосом), либо реле протока;
2) насос -> клапан (техходовой, регулирующий не нужен);
3) достаточно двухступенчатых термостатов для каждого датчика (1 ступень — клапан, 2 ступень — насос) с регулировкой гистерезиса на каждой ступени;
4) два режима: регулирование, дежурный (защита по обратке).
двухходовой кран ставится на байпасе подача-обратка (стояки) при духтрубной схеме теплоснабжения, достаточно механического регулятора.
Что такое ПИД регулятор для чайников?
Дифференциальный пропорционально-интегральный регулятор — устройство, которое устанавливают в автоматизированных системах для поддержания заданного параметра, способного к изменениям.
На первый взгляд все запутанно, но можно объяснить ПИД регулирование и для чайников, т.е. людей, не совсем знакомых с электронными системами и приборами.
Что такое ПИД регулятор?
ПИД регулятор — прибор, встроенный в управляющий контур, с обязательной обратной связью. Он предназначен для поддержания установленных уровней задаваемых величин, например, температуры воздуха.
Устройство подает управляющий или выходной сигнал на устройство регулирования, на основании полученных данных от датчиков или сенсоров. Контроллеры обладают высокими показателями точности переходных процессов и качеством выполнения поставленной задачи.

Три коэффициента ПИД регулятора и принцип работы
Работа ПИД-регулятора заключается в подаче выходного сигнала о силе мощности, необходимой для поддержания регулируемого параметра на заданном уровне. Для вычисления показателя используют сложную математическую формулу, в составе которой есть 3 коэффициента — пропорциональный, интегральный, дифференциальный.
Возьмем в качестве объекта регулирования ёмкость с водой, в которой необходимо поддерживать температуру на заданном уровне с помощью регулирования степени открытия клапана с паром.
Пропорциональная составляющая появляется в момент рассогласования с вводными данными. Простыми словами это звучит так — берется разница между фактической температурой и желаемой, умножается на настраиваемый коэффициент и получается выходной сигнал, который должен подаваться на клапан. Т.е. как только градусы упали, запускается процесс нагрева, поднялись выше желаемой отметки — происходит выключение или даже охлаждение.
Дальше вступает интегральная составляющая, которая предназначена для того, чтобы компенсировать воздействие окружающей среды или других возмущающих воздействий на поддержание нашей температуры на заданном уровне. Поскольку всегда присутствуют дополнительные факторы, влияющие на управляемые приборы, в момент поступления данных для вычисления пропорциональной составляющей, цифра уже меняется. И чем больше внешнее воздействие, тем сильнее происходят колебания показателя. Происходят скачки подаваемой мощности.
Интегральная составляющая пытается на основе прошлых значений температуры, вернуть её значение, если оно поменялось. Подробнее процесс описан в видео ниже.
А дальше выходной сигнал регулятора, согласно коэффициенту, подается для повышения или понижения температуры. Со временем подбирается та величина, которая компенсирует внешние факторы, и скачки исчезают.
Интеграл используется для исключения ошибок путем расчета статической погрешности. Главное в этом процессе — подобрать правильный коэффициент, иначе ошибка (рассогласование) будет влиять и на интегральную составляющую.
ПИД регулятор, простым языком о сложном.
Эта тема зрела давно, и разбивать её на три части было бы не совсем правильно. Поэтому приготовьтесь, будет несколько видео, несколько примеров и вообще, смело добавляйте её в закладки. В конце статьи буду добавлять ещё ссылки на материалы позднее, а теперь поехали.
Про тему регулирования и управления знают все, кто планировал что-либо автоматизировать. Если взяться за любой процесс и его пытаться автоматизировать, то в первую очередь необходимо начинать с технологии процесса .
То есть необходимо, как минимум, понимать, что с чем связано, и как всё происходит. Только затем составлять технологическую схему, и далее уже вводить регуляторы .
Способов регулирования достаточно большое количество, но достаточно простой и надежный, а самое главное, проверенный временем — это ПИД регулятор.
Почему именно ПИД, а не П или ПИ, или ПД, они же проще, скажете вы. Отвечу просто: из ПИД всегда можно получить любые три из них. Тем более, большинство современных регуляторов созданы на программном уровне, и обрабатываются микропроцессором, а не на ОУ (операционных усилителях), как раньше. Хотя на ОУ тоже достаточно интересно.
Итак, для начала, поделюсь видеороликом, снятым зарубежным коллегой и переведенным на русский язык, но с моими добавлениями.
Поверхностное описание принципа работы ПИД-регулирования
Теперь вы немного знакомы с общей идеей, и мы движемся дальше. Для того, чтобы описать процесс в формулах, необходимо вспомнить или узнать что такое:
- сложение — просто складываем два сигнала (например 5 В и 3 В), или
- вычитание — аналогично первому, только со знаком минус
- умножение — умножение одного числа на коэффициент (пропорциональное регулирование)
- интегрирование у меня есть целая статья об этом (накопление статистики и расчет того, насколько недостаточно, или, наоборот, избыточно воздействие)
- дифференцирование (это показатель динамики системы — ускоряемся мы или тормозим).
Если с первыми тремя пунктами всё предельно просто, то со следующими уже необходимо разбираться и понимать, как они воздействуют на объект. Но лучше обо всем по порядку. Я предлагаю рассмотреть пример отопления дома.
1. У нас нет регулирования.
Пример простой, но в то же время достаточно наглядный. В тех домах, где есть центральное отопление, мы принимаем радиаторы как они есть. Для нас эта система не регулируема. Мы можем только открывать форточки или дополнять установкой конвектора, но в целом, как нам подали тепло из центрального отопления, так мы его и принимаем. Подробнее можно посмотреть в видеоматериале.
Тогда просто термостат будет управлять в режиме «греть — не греть» (так называемое двухпозиционное регулирование). Но и его, при желании, можно настроить очень точно.
3. Пропор2. Система простого регулирования (двухпозиционное регулирование).
В данном случае о процессе регулирования говорить можно, но совсем приближенно. Хотя в целом, система будет устойчивой.
- теплогенератор — он же газовый котел
- датчик температуры, лучше сказать чувствительный элемент — биметаллическая пластина, которая даёт команду котлу греть или не греть
- система радиаторов, через которые идет воздействие на температуру в доме.
В данном случае котел будет подобран таким образом, чтобы в пике нагрузки работать на 80% мощности. То есть если требуется 20 кВт, то его максимальная мощность будет 24 кВт.
Нам для теоретических предположений можно сделать несколько поправок. Всё тепло, выданное котлом в систему, в итоге останется в доме (с учётом КПД самого котла).
Идея достаточно проста. Мы можем выдавать управляющее воздействие на объект с мощностью от 0 до 100%. Если объект мы также можем и охлаждать, то можно сделать от -50 до +50%. Самое главное — выбрать вспомогательный коэффициент. Но лучше по порядку.
Пропорциональное регулирование хорошо можно понять по картинке:
У нас есть клапан А, рычаг В и шток С, прикрепленный к поплавку. Как только поплавок начинает подниматься , он тут же через крепление В начинает прикрывать клапан А. Если вода уходит из емкости, поплавок опускается, и через рычаг В поднимает клапан А. Менять коэффициент регулирования можно с помощью приближения или удаления В от А. Менять уставку можно, удлиняя или укорачивая шток С. Это пример для наглядности. Для математического описания используем немного другую схему.
Итак, схема у нас есть и на рисунке всё подписано, теперь перейдем к формулам. U(t) — это воздействие на объект (на схеме тоже есть), оно получается из умножения ошибки е(t) (на схеме еще как дельта Х) на коэффициент пропорциональности.
Особенность пропорционального регулирования в том, что при нем есть статическая ошибка. Она взялась оттуда, что мы никогда не компенсируем её через обратную связь. Каждый раз уменьшая разницу между входом и выходом, мы уменьшаем и воздействие на регулятор. Как итог, ноля мы никогда не достигнем.
Подробнее, а заодно и другие виды регулирования, можете посмотреть на видео:
4. Интегральное регулирование.
В основе любого интегрирования лежит процесс суммирования. То есть, в данном случае мы будем производить накопление ошибки.
Сделаю небольшую оговорку, сейчас мы разбираемся с медленно изменяющимся процессом, для того, чтобы понять смысл работы каждого звена. В реальных процессах изучение идет через частотные составляющие, и подход к обработке сигнала отличается от текущего.
В нашем случае интегрирующее звено имеет смысл рассматривать совместно с пропорциональным, где они дополняют друг друга в работе.
В данном случае мы накапливаем эту ошибку на протяжении всего участка и, в итоге, устремляем систему к балансу, то есть минимизируем ошибку. Если в пропорциональном звене у нас есть статическая ошибка (постоянное недорегулирование), то с таким звеном мы будем устремлять эту ошибку к нулю.
Как это работает: пока есть ошибка, воздействие будет расти. Если произошло перерегулирование (ошибка стала отрицательной), то мы будем снижать воздействие. В этом вся суть интегрирующего звена в данной троице.
5. Дифференциальное регулирование.
В данном регуляторе, если вы посмотрели видеоролик, вся идея дифференцирования — это прогнозирование, предвидение ситуации. Заключается она в том, что мы ловим динамику.
Суть производной — это угол наклона характеристики.
Логично предположить, , что, зная наклон в данной точке, мы можем понимать, куда стремится функция. Соответственно, принимаем решение о «торможении» или наоборот, поддержке, тем самым сглаживая переходные моменты.
Как итог, хочу продемонстрировать интересную гифку из википедии. Её разбор есть в видеоролике.
Итак, это было знакомство с ПИД регулятором для начинающих.
А правильнее сказать — для вялотекущих процессов.
В реальности, в системах регулирования расчет и построение передаточных звеньев строится немного другим образом.
Если всё было бы так просто, то чему так долго учиться в ВУЗе? Если предыдущие 5 пунктов вам понятны, или вообще показались легкотней, то добро пожаловать в пункт 6, где тезисно знакомимся с ключевыми моментами настоящей ТАУ.
для особо продвинутых и тех, кто считает себя гуру, после прочтения 6 раздела добро пожаловать в комментарии.
6. ТЕОРИЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ — знакомство.
Итак, есть такая замечательная книга
Бесекерский В.А., Попов Е.П. Теория систем автоматического управления
её объем чуть более 700 страниц, чтобы её просто начать читать, я не говорю про понять, необходимо обладать следующими знаниями:
1.Пределы, производные и интегралы.
2. Линейные уравнения и матрицы.
3. Комплексные числа и работа с ними.
4. Различные частотные характеристики и передаточная функция.
То есть, если вы серьезно взялись за квадрокоптер, то банальным ПИД-ом тут не отделаться.
Вот пример из книги разбора интегрального звена(да да, там уже идут звенья)
При таком подходе изучение идет с точки зрения частотных характеристик сигнала. Так, например, любой усилитель — это набор звеньев, который должен пропускать и усиливать только необходимые частоты.
А такие формулы и преобразования:
для вас должны быть обыденными и типовыми.
Не сложно догадаться, что процесс моделирования — это, в первую очередь, понимание технологического процесса и знание азов высшей математики.
Я ни в коем случае не отговариваю Вас от того, чтобы идти дальше, наоборот, я показываю, где начинается настоящая динамика и робототехника.
Фактически мы с вами рассмотрели простое управление и реакцию с заглядыванием вперед. Возможно, чуть позднее еще добавлю ролик о другом ПИД регулировании.